KUKA机器人配置Profibus通讯教程
需积分: 5 124 浏览量
更新于2024-08-04
收藏 980KB DOC 举报
"库卡机器人PROFIBUS通讯配置教程"
这篇教程主要讲解了如何配置库卡(KUKA)机器人与S7-1200 PLC通过PROFIBUS通信。以下是对教程内容的详细阐述:
1. **硬件配置**:
- 库卡KRC4机器人:这是用于执行任务的自动化设备。
- EL6731-0010:这是库卡机器人的PROFIBUS DP接口模块,用于连接到PROFIBUS网络。
- S7-1200 PLC:西门子的可编程逻辑控制器,作为主站,负责控制整个系统。
- CM1243-5DP主站模块:这是S7-1200 PLC上的模块,用于实现PROFIBUS通信。
2. **项目上传**:
- 首先,确保电脑与机器人之间的网络连接正常,IP地址在同一网段。
- 使用KUKA提供的软件打开项目,通过“文件”>“查找项目”上传机器人原始配置。
3. **加载GSD文件**:
- GSD(Generic Station Description)文件是描述PROFIBUS设备的文件。
- 在“文件”>“导入/导出”中导入GSD文件,这允许系统识别并配置硬件设备。
4. **DTM样本管理**:
- DTM(Device Type Manager)是用于管理设备配置的工具。
- 导入所有相关硬件的GSD文件后,通过“工具”>“DTM样本管理”查找并安装已安装的DTM。
5. **网络配置**:
- 添加模块:配置网络时,需要在系统中添加EL6731-0010、ET200S I/O模块和SMC阀岛等硬件。
- 插槽设置:设定机器人作为PLC的从站,并分配相应的插槽。
6. **I/O信号配置**:
- 分配输入输出端口:在配置界面中,指定机器人和从站模块以及PLC主站的I/O信号端口。
7. **生成代码与下载**:
- 完成信号配置后,保存项目并生成代码。
- 下载代码到机器人中,需在专家用户模式下进行。
- 激活项目后,可能需要在安全维护用户模式下重新激活文件,以确保数据正确并建立网络连接。
这个教程为库卡机器人与S7-1200 PLC的PROFIBUS通信配置提供了详细步骤,对理解自动化系统的网络配置和设备集成具有指导意义。通过遵循这些步骤,用户能够成功实现两者间的通信,从而实现自动化生产线的有效协同工作。
KUKA 机器人 Profibus 通讯配置
硬件:KRC4 机器人、EL6731-0010、S71200、CM1243-5DP 主站模块
步骤:
1、上载机器人项目
用网线将机器人和电脑连接起来,连接时将电脑和机器人的 IP 地址设在同
一网段,打开项目后,选择文件,查找项目。上传机器人原始配置项目,加载机
器人内的项目。
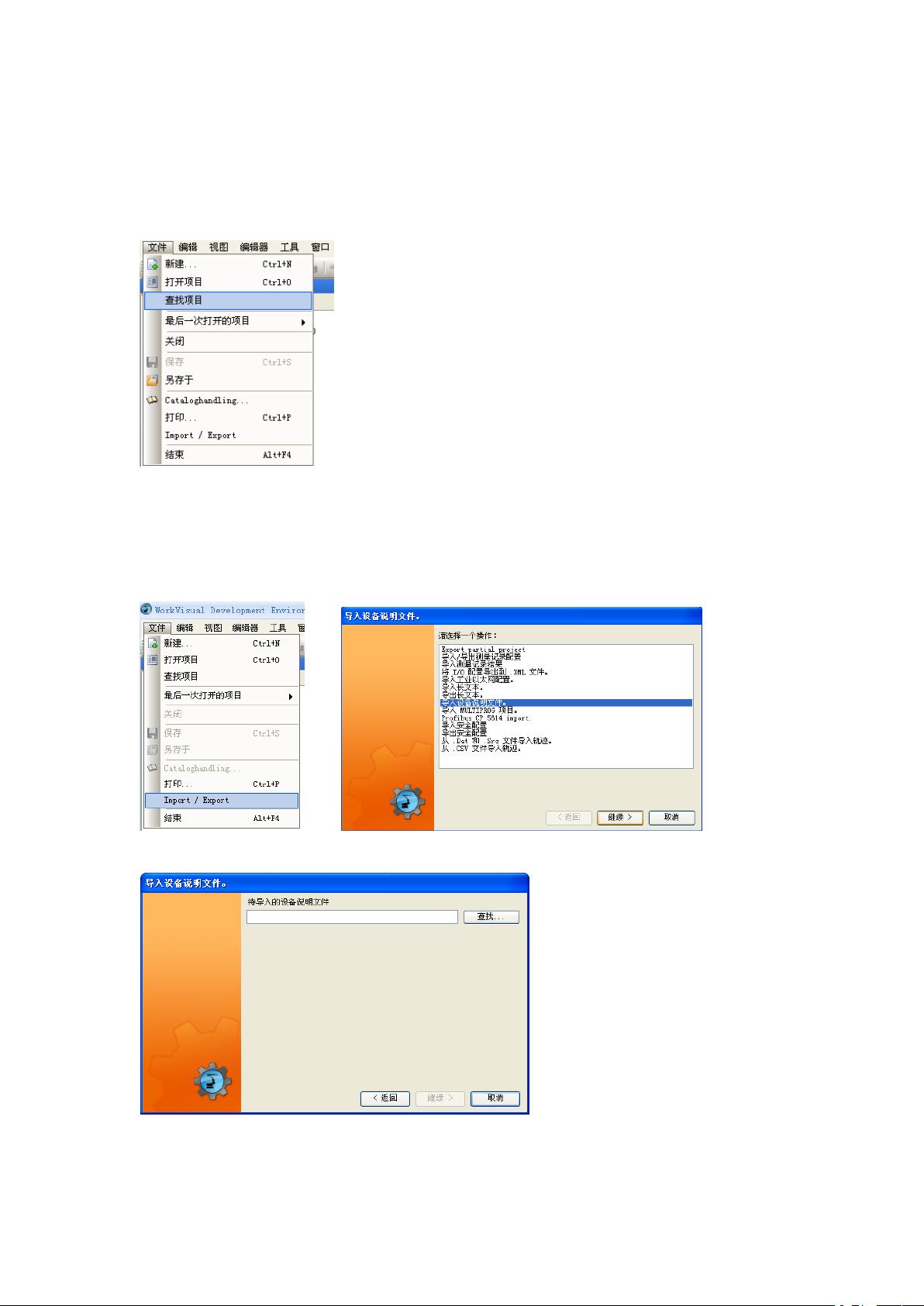
加载 GSD 文件
在文件—import/export
在打开的窗口中选择“导入说明文件”,然后点击右下角的“继续”按钮。
点击上图“查找”按钮,进入下一对话框。
下载后可阅读完整内容,剩余7页未读,立即下载
2022-06-19 上传
2022-06-19 上传
2018-08-05 上传
2016-05-27 上传
2021-10-06 上传
2021-09-29 上传
点击了解资源详情
2022-06-19 上传
2021-08-09 上传

博学纪年
- 粉丝: 0
- 资源: 39
 我的内容管理
展开
我的内容管理
展开







