JN5168数据手册:2.4GHz IEEE 802.15.4无线微控制器详解
需积分: 50 127 浏览量
更新于2024-07-20
收藏 977KB PDF 举报
JN5168是一款由NXPLabs生产的2.4GHz IEEE 802.15.4兼容无线微控制器,专为物联网(IoT)和低功耗应用设计。这款芯片集成了强大的功能,旨在简化开发过程并提供卓越的性能。
首先,从无线功能来看,JN5168具有128-bit AES安全处理器,确保数据传输的安全性。它配备了一个MAC加速器,支持数据包格式化、循环冗余校验(CRC)、地址检查、自动应答以及定时器,提高了通信效率和可靠性。内置的超低功耗睡眠振荡器仅消耗0.6 µA电流,非常适合电池供电设备。接收时的电流为17 mA,而发送时为15 mA,这意味着在功耗管理上非常出色,接收灵敏度达到了-95 dBm,而发射功率为2.5 dBm,满足了远距离通信的需求。此外,它还配备了时间飞行(TOF)引擎,可用于测距功能,并支持多路径天线技术(Auto RX),提高信号稳定性和抗干扰能力。
作为微控制器部分,JN5168搭载了32位RISC CPU,工作频率可调整在1 MHz到32 MHz之间,具有可变指令宽度,提升了代码执行效率。微控制器内部有不同版本的闪存、RAM和EEPROM存储空间,如JN5161有64 kB/8 kB/4 kB,JN5164升级至160 kB/32 kB/4 kB,而JN5168则进一步扩展到256 kB/32 kB/4 kB。数据EEPROM提供至少100,000次写操作的保证,确保长期的存储稳定性。
JN5168还集成了一系列预加载的通信协议栈,包括RF4CE(无线电力传输)、JenNet-IP(一种轻量级网络协议)、ZigBee SE(安全模式)和ZigBee Light Link,使得设备能够快速适应不同的无线通信场景。该芯片还支持2-wire I2C兼容串行接口,作为主设备或从设备都能正常工作,提供了丰富的外设控制选项。
此外,微控制器具备5个PWM通道,其中4个用于定时器和1个用于计数器,支持高级定时和脉宽调制功能。同时,还有两个低功耗计数器,有助于在需要节能的应用中实现精细的时间管理。
总结来说,JN5168是一款高度集成且功能丰富的微控制器,它结合了高效能的无线通信、强大的处理能力和多种实用的接口,适合于构建各种物联网应用,如智能家居、工业监控和无线传感器网络等。对于开发人员而言,这款芯片提供了全面的硬件支持和优化的软件解决方案,极大地降低了开发难度和成本。
16 JN-DS-JN516x v1.3 Production © NXP Laboratories UK 2013
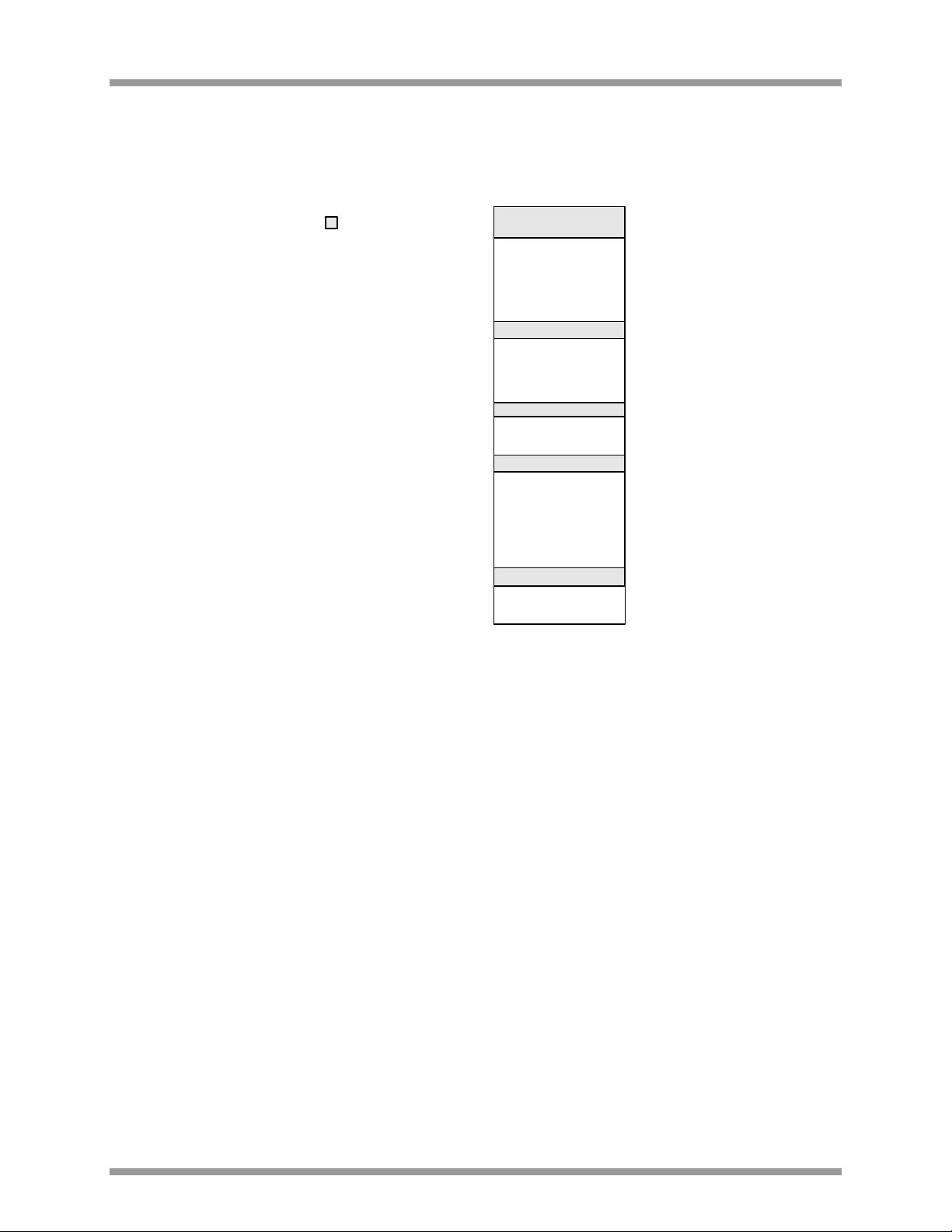
4 Memory Organisation
This section describes the different memories found within the JN516x. The device contains Flash, RAM, and
EEPROM memory, the wireless transceiver and peripherals all within the same linear address space.
0xFFFFFFFF
Unpopulated
0xF0008000
RAM
0x04000000
0x02000000
FLASH Boot Code 8K
0x000C0000
0x00000000
0x00080000
Flash & EEPROM Registers
0x01000000
Peripherals
FLASH
Applications
Code
(256KB)
Figure 5: JN5168 Memory Map
4.1 FLASH
The embedded Flash consists of 2 parts: an 8K region used for holding boot code, and a 256K region (JN5168) used
for application code. The sector size of the application code is always 32K, for any size of Flash memory. The
maximum number of write cycles or endurance is, 10k guaranteed and typically 100k, while the data retention is
guaranteed for at least 10 years. The boot code region is pre-programmed by NXP on supplied parts, and contains
code to handle reset, interrupts and other events (see section 7). It also contains a Flash Programming Interface to
allow interaction with the PC-based Flash Programming Utility which allows user code compiled using the supplied
SDK to be programmed into the Application space. For further information, refer to the Flash Programmer User
Guide.[9]. The memory can be erased by a single or multiple sectors and written to in units of 256 bytes, known as
pagewords.
4.2 RAM
The JN516x devices contain up to 32Kbytes of high speed RAM, which can be accessed by the CPU in a single clock
cycle. It is primarily used to hold the CPU Stack together with program variables and data. If necessary, the CPU can
execute code contained within the RAM (although it would normally just execute code directly from the embedded
Flash). Software can control the power supply to the RAM allowing the contents to be maintained during a sleep
period when other parts of the device are un-powered, allowing a quicker resumption of processing once woken.
4.3 OTP Configuration Memory
The JN516x devices contain a quantity of One Time Programmable (OTP) memory as part of the embedded Flash
(Index Sector). This can be used to securely hold such things as a user 64-bit MAC address and a 128-bit AES
security key. By default the 64-bit MAC address is pre-programmed by NXP on supplied parts; however customers

剩余93页未读,继续阅读
2024-08-16 上传
2023-07-15 上传
2023-06-02 上传
2023-09-16 上传
2023-06-01 上传
2023-05-27 上传
2023-06-02 上传

a247534855
- 粉丝: 0
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
