
机器人转动关节的机器人转动关节的LuGre摩擦模型参数辨识摩擦模型参数辨识
根据LuGre摩擦模型辨识理论,以伺服电机驱动轴与伺服电机内部的摩擦模拟机器人关节摩擦,建立LuGre摩擦
模型。对伺服电机做基于固高卡的模拟量控制,通过C++编程,从编码器中读取角度、转速值、加速度值。正转
速度和对应的驱动力矩,以及反转速度和对应的驱动力矩,分别构成静态参数辨识的两组数据。位移、速度、
加速度和驱动力矩构成动态参数辨识数据。在Matlab中编写粒子群算法辨识程序,对以上数据进行处理,最终
得到LuGre模型的6个参数的辨识值。
摘 摘 要要: 根据
关键词关键词: LuGre;摩擦模型;模拟量控制;粒子群算法
0 引言引言
机器人的控制性能与动力学模型建立的精确度密切相关。由于摩擦而产生的关节阻尼是存在于机器人机构各构件之间的主
要耗能因素,通常看成干摩擦阻尼。对于干摩擦阻尼的描述,近几十年来提出了许多数学模型,其中,LuGre摩擦模型全面而
简洁地描述了摩擦力的动静态特性,受到了很大的重视。
LuGre摩擦模型将微观下接触表面看成是大量的具有随机行为的弹性鬃毛,其数学描述为:
其中,参数Fc,Fs ,Vs,σ2为静态摩擦参数,用来描述运动副接触面间发生滑动后的摩擦现象,而参数σ0、σ1为动态摩
擦参数,用来描述运动副处于粘着状态下(即处于预滑动摩擦区域)的摩擦力与预滑动之间的关系。这6个参数可精确诠释摩擦
力粘滑运动、摩擦滞后、预滑动位移、稳态振荡环等。
1 国内外研究现状国内外研究现状
参考文献[1]和参考文献[2]分别采用遗传算法和粒子群算法对LuGre模型分静力参数及动力参数两步来实现参数的辨识。但
是在辨识动力参数时,上述两文献利用带有PID控制器稳态振荡环辨识参数,存在实现振荡环需根据经验来调节PID控制的比
例因子﹑微分因子以及积分因子的问题。
参考文献[3]利用改进遗传算法和粒子群算法对摩擦力LuGre模型的6个参数进行辨识。静力参数辨识方法同参考文献[1-
2],但在动力参数辨识时采用传感器输出的位移或加速度以及输出的控制剪切力直接进行参数辨识,在辨识过程中把控制剪切
力作为目标逼近值,进而辨识出两个动力参数。此动力参数辨识过程与参考文献[1-2]的精度和效率相比具有更快的参数辨识速
度和更好的鲁棒性能,同时避免了PID选取过程。参考文献[4]提供了具体程序编制,但没有开展实验研究工作。本文的目的是
通过实验研究来获取摩擦参数。
2 单自由度机器人转动关节单自由度机器人转动关节LuGre摩擦模型的建立摩擦模型的建立
由参考文献[4]可知,进行静态参数辨识时,需要多组机器人转动关节在已知的驱动力矩作用下对应的正转速度值和反转
速度值。进行动态参数辨识时,需要多组机器人转动关节在已知的驱动力矩作用下对应的位移、转速、加速度值。在搭建实验
平台时,电机和卷筒构成单自由度系统,电机输出轴与电机固定本体构成一个转动关节,卷筒通过联轴器与电机输出轴相连,
模拟机器人转动关节的运动,建立机器人转动关节LuGre摩擦模型。上述静、动态参数辨识所需要的数据即是伺服电机在已知
驱动力矩作用下的相关数据。
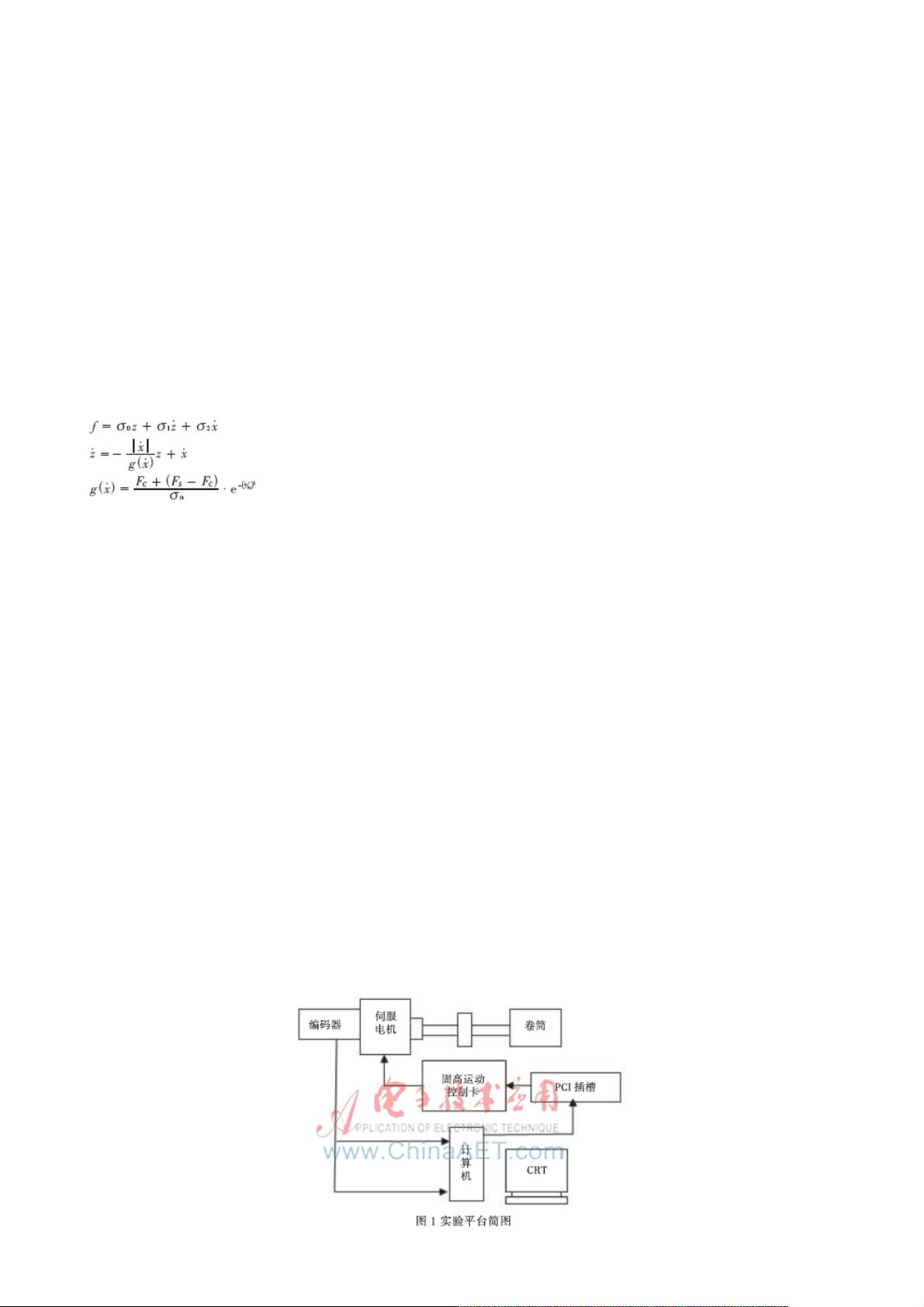
建立LuGre摩擦模型后,加以辅助和控制装置。该实验平台主要包括机架、伺服电机与驱动器、运动控制卡以及用于控制
的上位机等,如图1所示。本实验选用的伺服电机为松下A5系列的MHMD082G1V,功率为750 W,驱动器型号为
MCDHT3520。
关节所受的电机驱动力(或力矩)与关节所受的摩擦力之间的关系可用下面的微分方程表示:

weixin_38599537
- 粉丝: 8
- 资源: 923
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0