
贵州大学本科毕业论文(设计)
第 2 章 数字滤波器的理论研究
2.1 数字滤波器的定义分类和结构原理
数字滤波器是指完成信号滤波处理功能的,用有限精度算法实现的离教时间线性非时
变系统,其输入是一组数字量,其输出是经过变换的另一组数字量。因此,数字滤波器本
身既可以是用数字硬件装配成的一台完成给定运算的专用的数字计算机,也可以将所需要
的运算编成程序,让通用计算机来执行。数字滤波器具有稳定性高、精度高、灵活性大等
突出的优点。随着数字技术的发展,用数字技术实现滤波器的功能越来越受到人们的注意
和广泛的应用。从数字滤波器的单位冲击响应来看,可分为两大类:有限冲击响应%389(
数字滤波器和无限冲击响应%889(数字滤波器。滤波器按功能上分可以分为:低通滤波器
%13(、高通滤波器%73(、带通滤波器%3(、带阻滤波器%+3(。
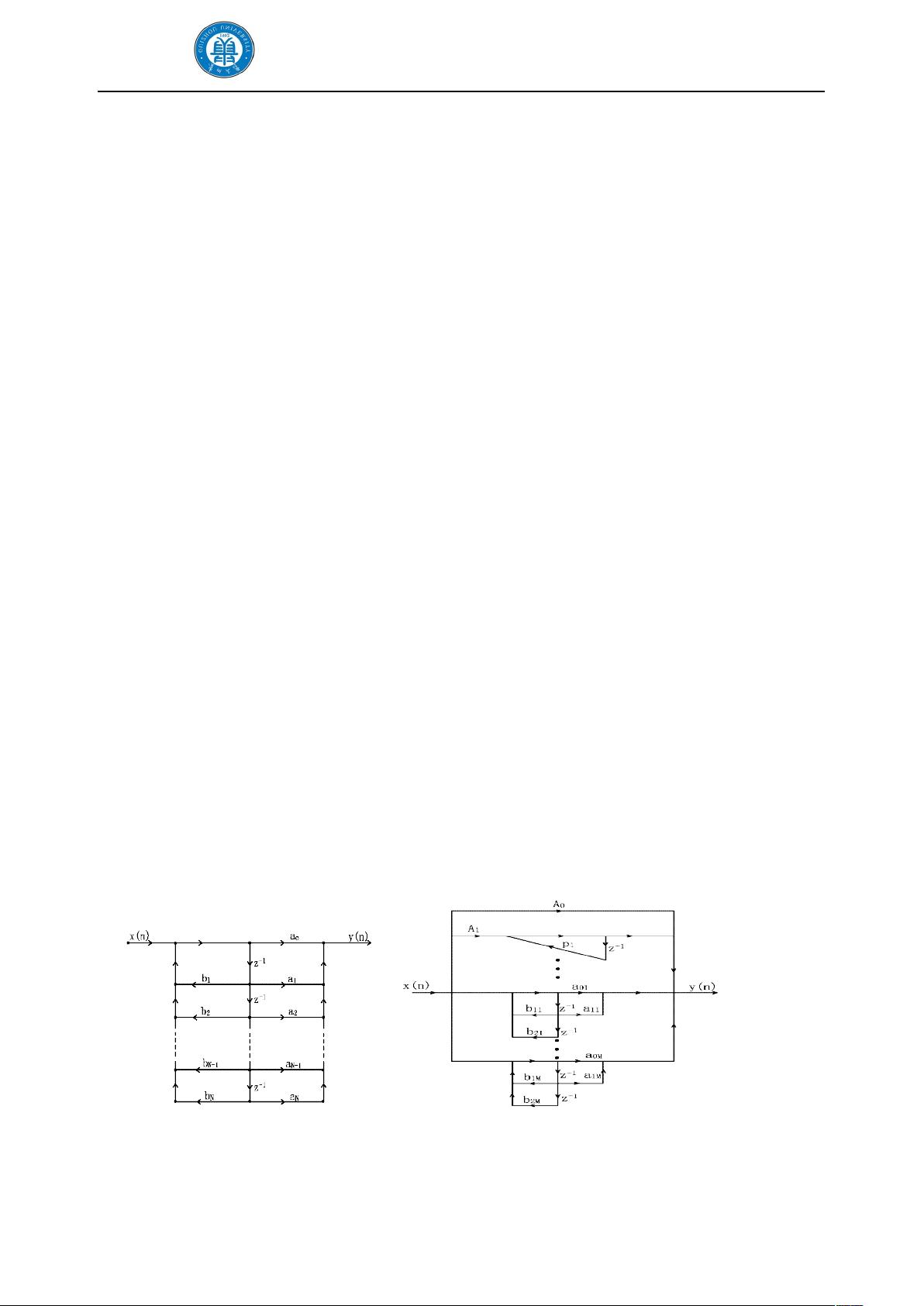
2.1.1 IIR 数字滤波器的基本结构
一个数字滤波器可以用系统函数表示为:
%&(
由这样的系统函数可以得到表示系统输入与输出关系的常系数线形差分为
:
%&(
8

剩余52页未读,继续阅读















