读取读取.bin激光雷达点云文件格式并可视化三种的方法激光雷达点云文件格式并可视化三种的方法
申明:从KITTI官网下载到的激光雷达点云数据为.bin格式,为此找到了三种方法,现在分享出来大家一起讨论。
程序运行环境程序运行环境
运行测试系统:Ubuntu16.04
运行环境:python3.6
方法一:使用方法一:使用numpy库读取库读取.bin数据并使用数据并使用mayavi.mlab来可视化点云数据来可视化点云数据
1、安装通过下属命令安装依赖库
pip install numpy -i https://pypi.tuna.tsinghua.edu.cn/simple
pip install mayavi -i https://pypi.tuna.tsinghua.edu.cn/simple
2、通过以下代码读取.bin文件并可视化
import numpy as np
import mayavi.mlab
# lidar_path换成自己的.bin文件路径
pointcloud = np.fromfile(str("lidar_path"), dtype=np.float32, count=-1).reshape([-1, 4])
x = pointcloud[:, 0] # x position of point
y = pointcloud[:, 1] # y position of point
z = pointcloud[:, 2] # z position of point
r = pointcloud[:, 3] # reflectance value of point
d = np.sqrt(x ** 2 + y ** 2) # Map Distance from sensor
degr = np.degrees(np.arctan(z / d))
vals = 'height'
if vals == "height":
col = z
else:
col = d
fig = mayavi.mlab.figure(bgcolor=(0, 0, 0), size=(640, 500))
mayavi.mlab.points3d(x, y, z,
col, # Values used for Color
mode="point",
colormap='spectral', # 'bone', 'copper', 'gnuplot'
# color=(0, 1, 0), # Used a fixed (r,g,b) instead
figure=fig,
)
mayavi.mlab.show()
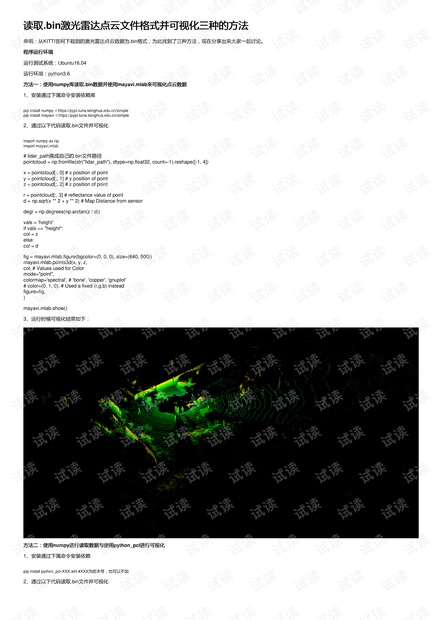
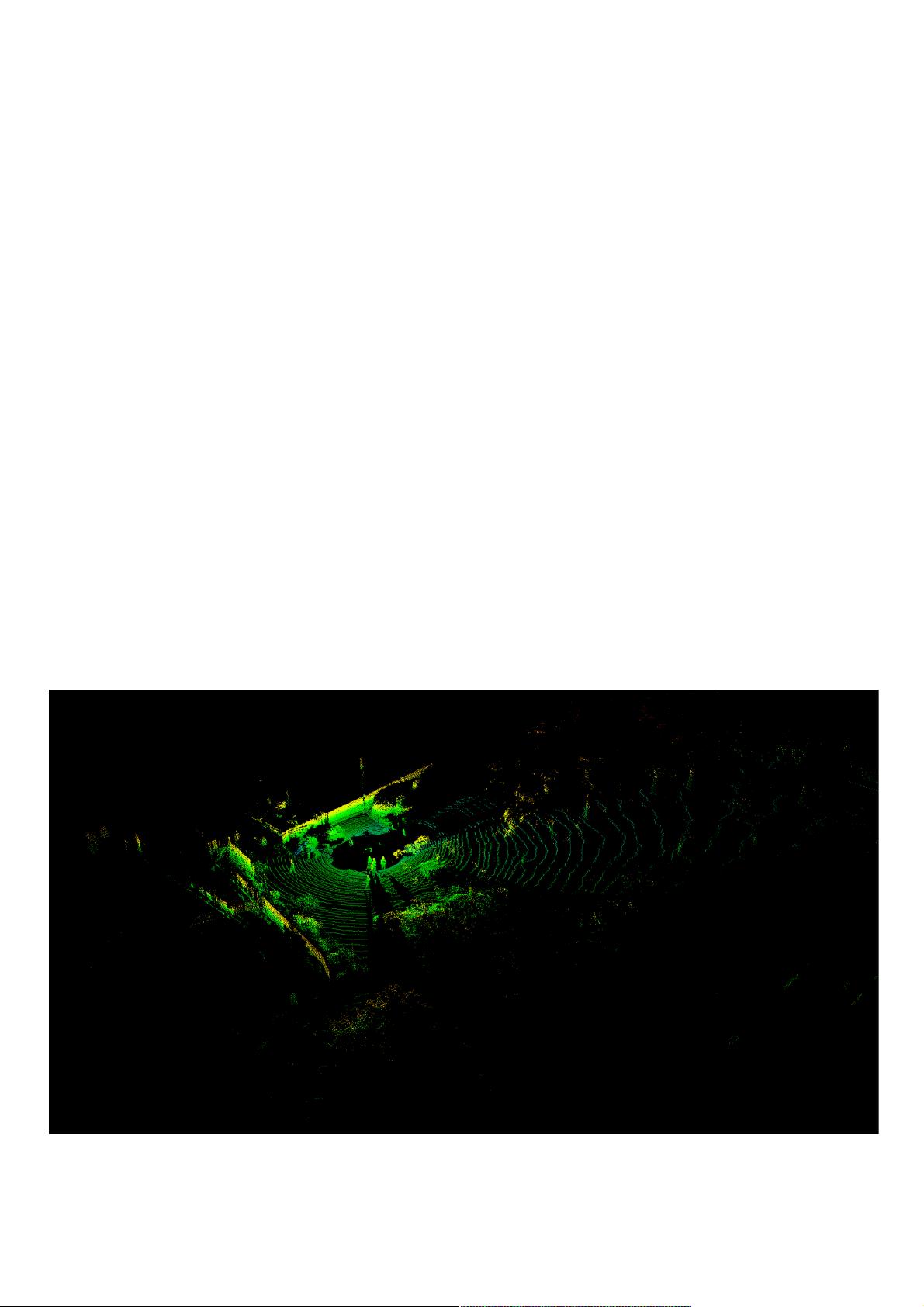
3、运行时候可视化结果如下:
方法二:使用方法二:使用numpy进行读取数据与使用进行读取数据与使用python_pcl进行可视化进行可视化
1、安装通过下属命令安装依赖
pip install python_pcl-XXX.whl #XXX为版本号,也可以不加
2、通过以下代码读取.bin文件并可视化

weixin_38662089
- 粉丝: 5
- 资源: 915
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0