FANUC机器人TCP/IP通信设置手册
"FANUC机器人Socket Message通讯设置及使用手册(中文版)"
该手册是针对FANUC机器人与第三方设备进行TCP/IP通信的详细指南,特别适合于那些需要使用FANUC机器人与上位机或工业相机进行数据交换的应用场景。通过Socket Message通信方式,用户可以实现FANUC机器人与外部系统的高效互动。
1. **简介**
FANUC机器人Socket Message通信功能允许机器人与上位机或工业相机之间通过TCP/IP协议交换数据。通信指令结构简单,例如`#R[i],R[i],R[i],R[i],R[i]`,可以发送五个连续寄存器的值给上位机。
2. **机器人软硬件要求**
- **硬件**:所有FANUC机器人型号都适用,但需要一个USB存储器来导入相关的程序。
- **软件**:机器人系统版本至少需要V8.30P,如果使用的是V9.10P系列,需要联系上海发那科获取支持。同时,需要安装Option软件UserSocketMsg(R648)。
3. **机器人设定**
- **系统变量设定**:为了启用Socket Message功能,需要在机器人的系统变量中设置$KAREL_ENB为1,这可以通过菜单中的系统设置完成。
- **IP地址设定**:设置机器人的IP地址是通信的前提,用户需在机器人控制器的网络设置中进行配置。
4. **软件导入**
这部分可能详细介绍了如何将所需的通信软件导入到FANUC机器人的操作系统中,以便执行TCP/IP通信。
5. **使用方法及样本程序**
- **程序说明**:手册会包含关于如何编写和理解通讯程序的说明。
- **在TP程序中调用通讯程序**:说明如何在机器人的触摸屏程序(TP程序)中集成通信功能。
- **通讯程序示例**:提供具体的代码示例,帮助用户理解和实现通信功能。
- **程序使用说明**:详细解释了如何运行和管理这些通信程序,确保它们能正常工作并与上位机或相机交互。
这份手册提供了FANUC机器人使用Socket Message进行TCP/IP通信的全面指南,包括硬件需求、软件配置、通信设置以及实际编程应用,对于开发者和操作者来说是十分宝贵的参考资料。通过遵循手册中的步骤,用户能够有效地实现FANUC机器人与外部系统的集成和数据交换。
SM-015/01
-4-
(1) 按 MENU 键
(2) 选择 SETUP
(3) 按 F1【TYPE】
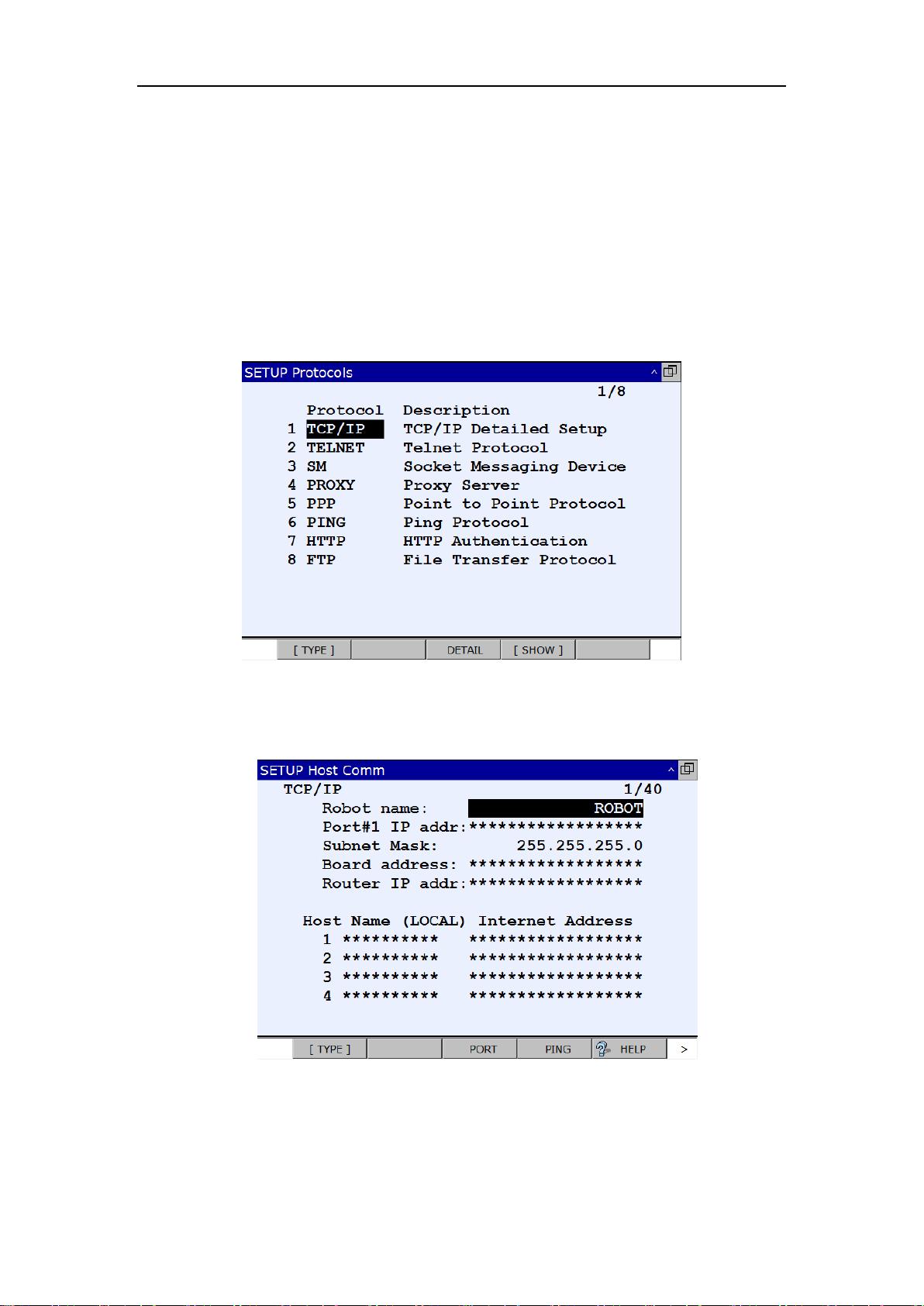
(4) 选择 Host Comm,进入如下界面
选择 TCP/IP,按 Enter 键或 F3【DETAIL】键,进入:
在 Port#1 IP addr 所在行输入机器人的 IP 地址,例如 192.168.0.1。上位机的
IP 地址和机器人的 IP 地址需在同一网段,例如上位机 IP 地址可设为 192.168.0.2
剩余26页未读,继续阅读
2020-02-27 上传
2023-06-13 上传
点击了解资源详情
2024-01-30 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

西红柿火少蛋
- 粉丝: 5
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- sentry-ssdb-nodestore:Sentry的SSDB NodeStore后端
- 附近JavaScript:适用于JavaScript的ArcGIS API应用程序可查找附近的地点并路由到最近的位置
- aiap-field-guide:每周Aiap课程
- Ambit Components Collection-开源
- Glider Screen-crx插件
- PCB_FDTD.zip_matlab例程_C++_Builder_
- 快速收集视图的自定义蜂窝布局-Swift开发
- js-pwdgen-wannabe
- facebook-sdk:适用于Facebook Graph API的Python SDK
- markdown文档转pdf工具
- lucy:基于键值存储网络的聊天机器人
- Year Clock-crx插件
- goodmobileirisrecognition.rar_matlab例程_matlab_
- matlab人脸检测框脸代码-opencv4nodeJs-4.5.2:适用于Node.js的OpencvBuild
- CTI110:CTI110存储库
- L-one-crx插件
