
西门子 S7-200PLC 在伺服电机位置控制中的应用
作者:不详
阅读人次:969
发布时间:2011-12-09
0引言
随着自动化水平的不断提高,越来越多的工业控制场合需要精确的位置控制。因此,如何更方便、更准确地实现位置控
制是工业控制领域内的一个重要问题。位置控制的精确性主要取决于伺服驱动器和运动控制器的精度。高端的运动控制模块可
以对伺服系统进行非常复杂的运动控制。但在有些需要位置控制的场合,其对位置精度的要求比较高,但运动的复杂程度不是
很高,这就没有必要选择那些昂贵的高端运动控制系统。
S7-200
系列 PLC
是一种体积小、编程简单、控制方便的可编程控制器,它提供了多种位置控制方式可供用户选择,因
此,如何利用该系列 PLC 实现对伺服电机运动位置较为精准的控制是本文的研究重点。
1. 基本控制系统
伺服系统分为液压伺服系统、电气-液压伺服系统以及电气伺服系统。本文主要讨论了电气伺服系统中的交流伺服系统,
其基本组成为交流伺服电机、编码器和伺服驱动器。交流伺服系统的工作原理是伺服驱动器发送运动命令,驱动伺服电机运动,
并接收来自编码器的反馈信号,然后重新计算伺服电机运动目标位置,从而达到精确控制伺服电机运动。
本伺服系统中选用 Exlar 公司生产的 GSX50-0601 型伺服直线电动缸。该电动缸由普通伺服电机和一个行星滚珠丝杠组
成,用来实现将旋转运动转变为直线运动。此外,选用 Xenus 公司生产的 XenusTM 型伺服驱动器。它可以利用 RS.232 串
口通信方式和外部脉冲方式实现位置控制。
一般来说,一个伺服系统运转需要配置一个上位机,所以本系统采用西门子
S7-200 PLC 作为上位机控制器。通过高速
脉冲输出、EM253 位置控制模块、自由口通信三种方式控制伺服电机运动。
2. 高速脉冲输出模式
西门子 CPU224XP 配置两个内置脉冲发生器,它有脉冲串输出(PTO)和脉冲宽度调制输出两种脉冲发生模式可供选择。
这两个脉冲发生器的最大脉冲输出频率为 100 kHz。在脉冲串输出方式中,PLC 可生成一个 50%占空比脉冲串,用于步进电机
或伺服电机的速度和位置的控制。
2.1 硬件构成
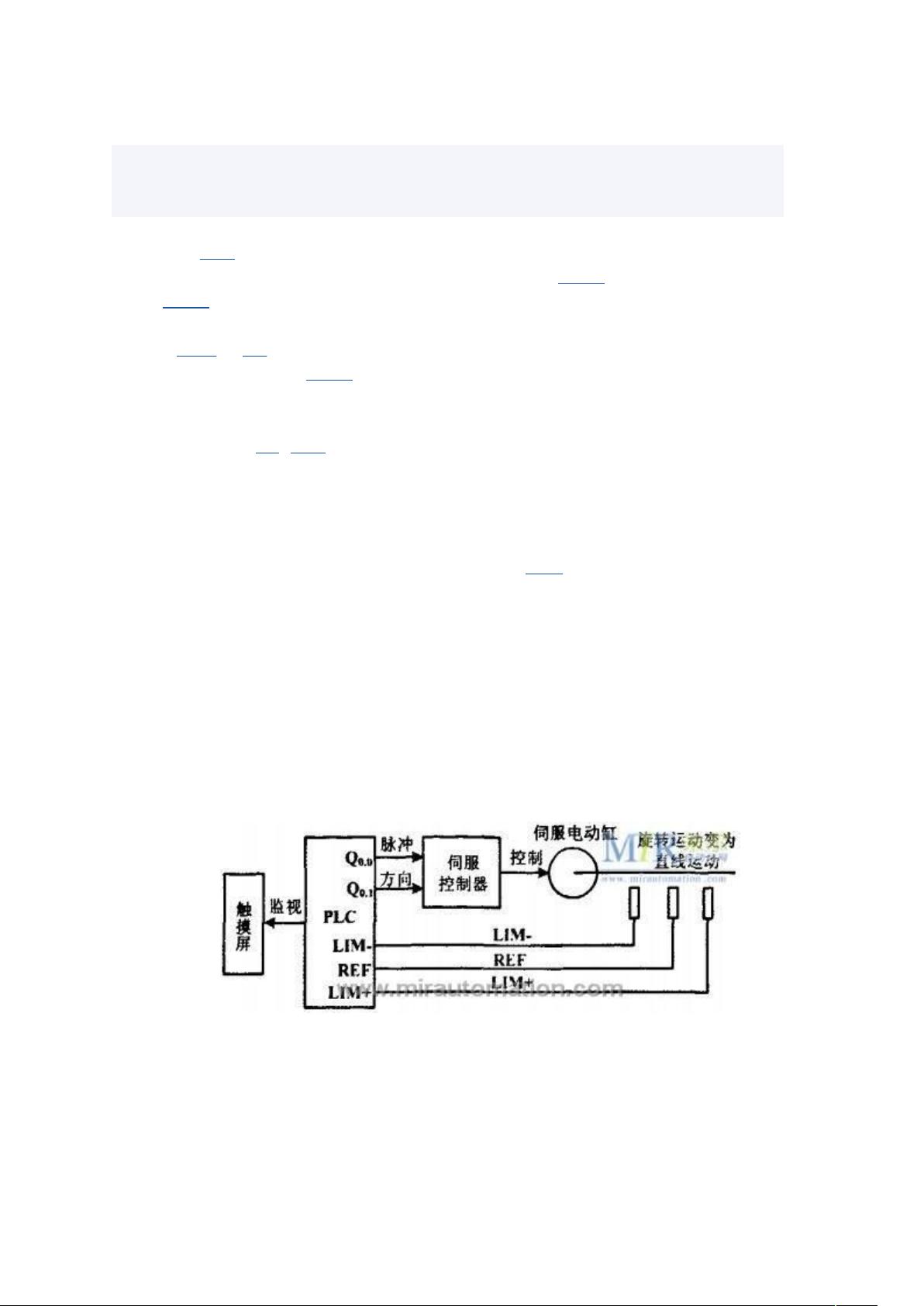
图 1 为高速脉冲输出方式的位置控制原理图。控制过程中,将伺服驱动器工作定义在脉冲+方向模式下,Q0.0 发送脉冲
信号,控制电机的转速和目标位置;Qo,发送方向信号,控制电机的运动方向。伺服电动缸上带有左限位开关 LIM 一、右限
位开关 LIM+以及参考点位置开关 REF。三个限位信号分别连接到 CPU224XP 的 I0.0~I0.2 三个端子上,可通过软件编程,实
现限位和找寻参考点。
图 1 位置控制原理图
2.2 程序设计
高速脉冲串输出(PTO)可以通过 Step 7 Micro/WIN 的位置控制向导进行组态,也可通过软件编程实现控制。PTO 输出
方式没有专门的位置控制指令,只有一条脉冲串输出指令,而且在脉冲发送过程中不能停止,也不能修改参数。为解决以上问
题,可以设置脉冲计数值等于 10(或更小),并能使脉冲发送指令 PLS 处于激活状态。这样,就可以在任一脉冲串发送完之后修
改脉冲周期。

孤注一掷558
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 计算机系统基石:深度解析与优化秘籍
- 《ThinkingInJava》中文版:经典Java学习宝典
- 《世界是平的》新版:全球化进程加速与教育挑战
- 编程珠玑:程序员的基础与深度探索
- C# 语言规范4.0详解
- Java编程:兔子繁殖与素数、水仙花数问题探索
- Oracle内存结构详解:SGA与PGA
- Java编程中的经典算法解析
- Logback日志管理系统:从入门到精通
- Maven一站式构建与配置教程:从入门到私服搭建
- Linux TCP/IP网络编程基础与实践
- 《CLR via C# 第3版》- 中文译稿,深度探索.NET框架
- Oracle10gR2 RAC在RedHat上的安装指南
- 微信技术总监解密:从架构设计到敏捷开发
- 民用航空专业英汉对照词典:全面指导航空教学与工作
- Rexroth HVE & HVR 2nd Gen. Power Supply Units应用手册:DIAX04选择与安装指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


