
Matlab 偏微分方程求解方法
目录:
§1 Function Summary on page 10-87
§2 Initial Value Problems on page 10-88
§3 PDE Solver on page 10-89
§4 Integrator Options on page 10-92
§5 Examples” on page 10-93
§1 Function Summary
1.1 PDE Solver” on page 10-87
1,2 PDE Helper Function” on page 10-87
1.3 PDE Solver
This is the MATLAB PDE solver.
PDE Initial-BoundaryValue
Problem Solver
Description
pdepe Solve initial-boundary value problems for systems of
parabolic and elliptic PDEs in one space variable and
time.
PDE Helper Function
PDE Helper Function Description
pdeval Evaluate the numerical solution of a PDE using the
output of pdepe
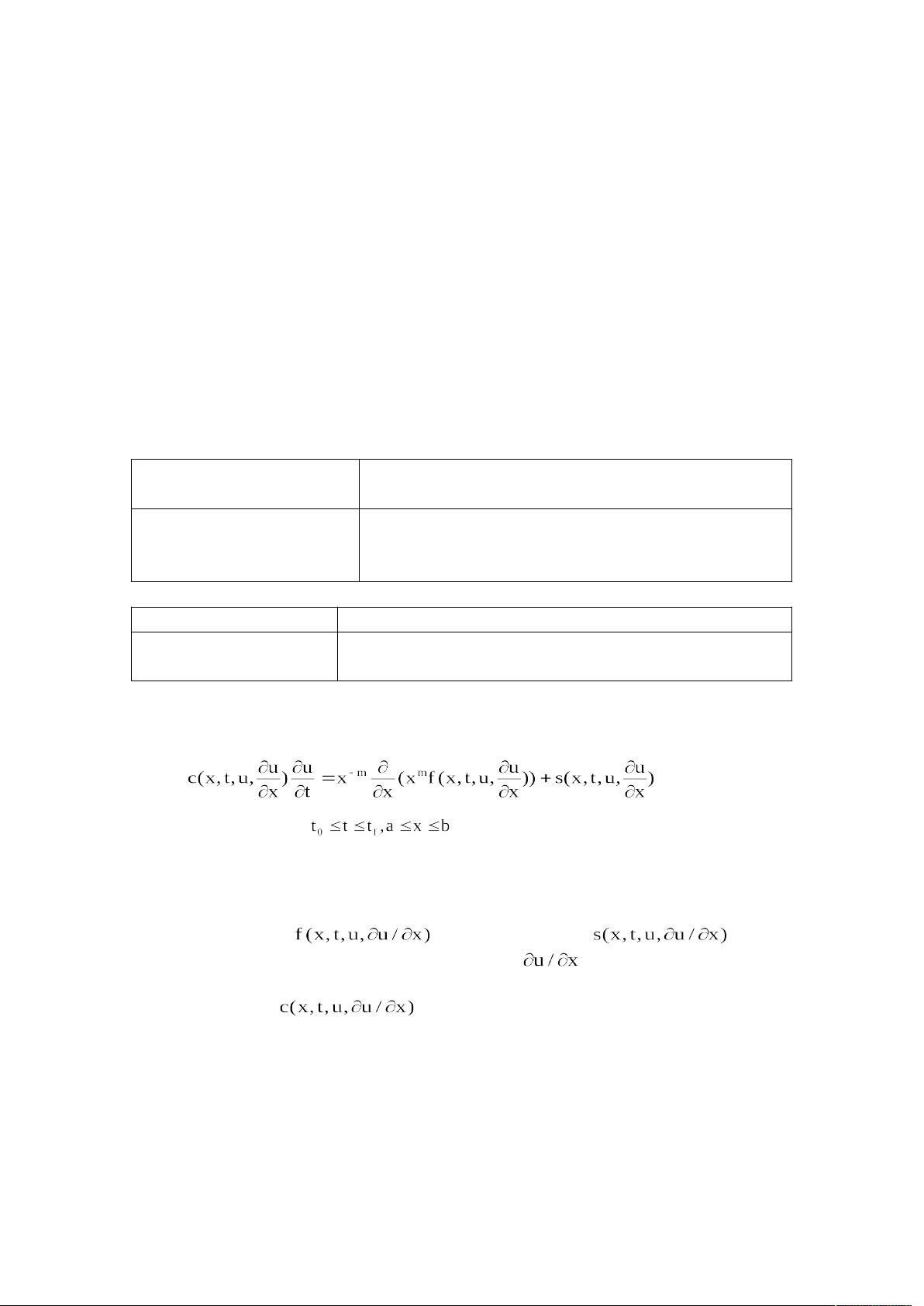
§2 Initial Value Problems
pdepe solves systems of parabolic and elliptic PDEs in one spatial
variable x and time t, of the form
(10-2)
The PDEs hold for .The interval [a, b] must be finite. m
can be 0, 1, or 2, corresponding to slab, cylindrical, or spherical
symmetry,respectively. If m > 0, thena≥0 must also hold.
In Equation 10-2, is a flux term and is a
source term. The flux term must depend on . The coupling of the
partial derivatives with respect to time is restricted to multiplication by a
diagonal matrix . The diagonal elements of this matrix are
either identically zero or positive. An element that is identically zero
corresponds to an elliptic equation and otherwise to a parabolic equation.
There must be at least one parabolic equation. An element of c that
corresponds to a parabolic equation can vanish at isolated values of x if
they are mesh points.Discontinuities in c and/or s due to material
interfaces are permitted provided that a mesh point is placed at each
剩余10页未读,继续阅读

weixin_41822276
- 粉丝: 0
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 计算机系统基石:深度解析与优化秘籍
- 《ThinkingInJava》中文版:经典Java学习宝典
- 《世界是平的》新版:全球化进程加速与教育挑战
- 编程珠玑:程序员的基础与深度探索
- C# 语言规范4.0详解
- Java编程:兔子繁殖与素数、水仙花数问题探索
- Oracle内存结构详解:SGA与PGA
- Java编程中的经典算法解析
- Logback日志管理系统:从入门到精通
- Maven一站式构建与配置教程:从入门到私服搭建
- Linux TCP/IP网络编程基础与实践
- 《CLR via C# 第3版》- 中文译稿,深度探索.NET框架
- Oracle10gR2 RAC在RedHat上的安装指南
- 微信技术总监解密:从架构设计到敏捷开发
- 民用航空专业英汉对照词典:全面指导航空教学与工作
- Rexroth HVE & HVR 2nd Gen. Power Supply Units应用手册:DIAX04选择与安装指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


