
16
1.4 安全防护措施
安全防护
和其他普通自动机械不同,机器人有机械手臂和腕关节,可以在所有的操作空间移动。
机器人很灵活,同时也很危险。机器人通常都和包含了自动化系统的外围设备连接。使用者
必须对整个系统采取安全防护措施。安全防护措施介绍如下:
安装和布线的安全措施
¾ 用警告灯和其他物品显示机器人正在工作。
图1--1. 警告指示
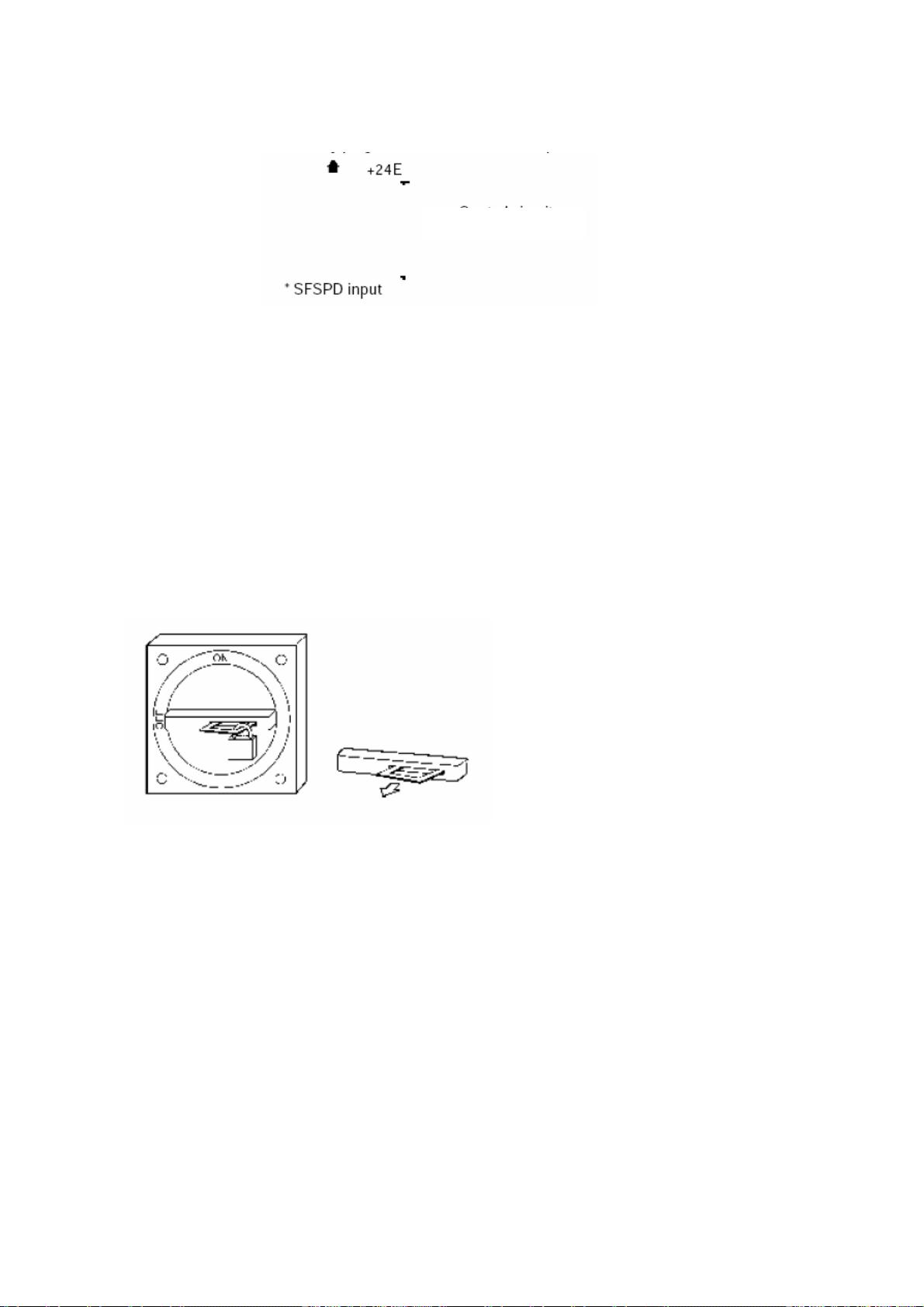
¾ 在系统周围设置有安全门的保护性的围栏,这样仅仅操作者才能通过这道门进入操作
区。设计使系统使门打开时,系统停止。
说明:连接*FENCE(围栏)输入信号到安全门。参考维护手册的连接说明。
说明:当 *SFSPD(安全速度)输入信号关闭时,控制单元暂停机器人。
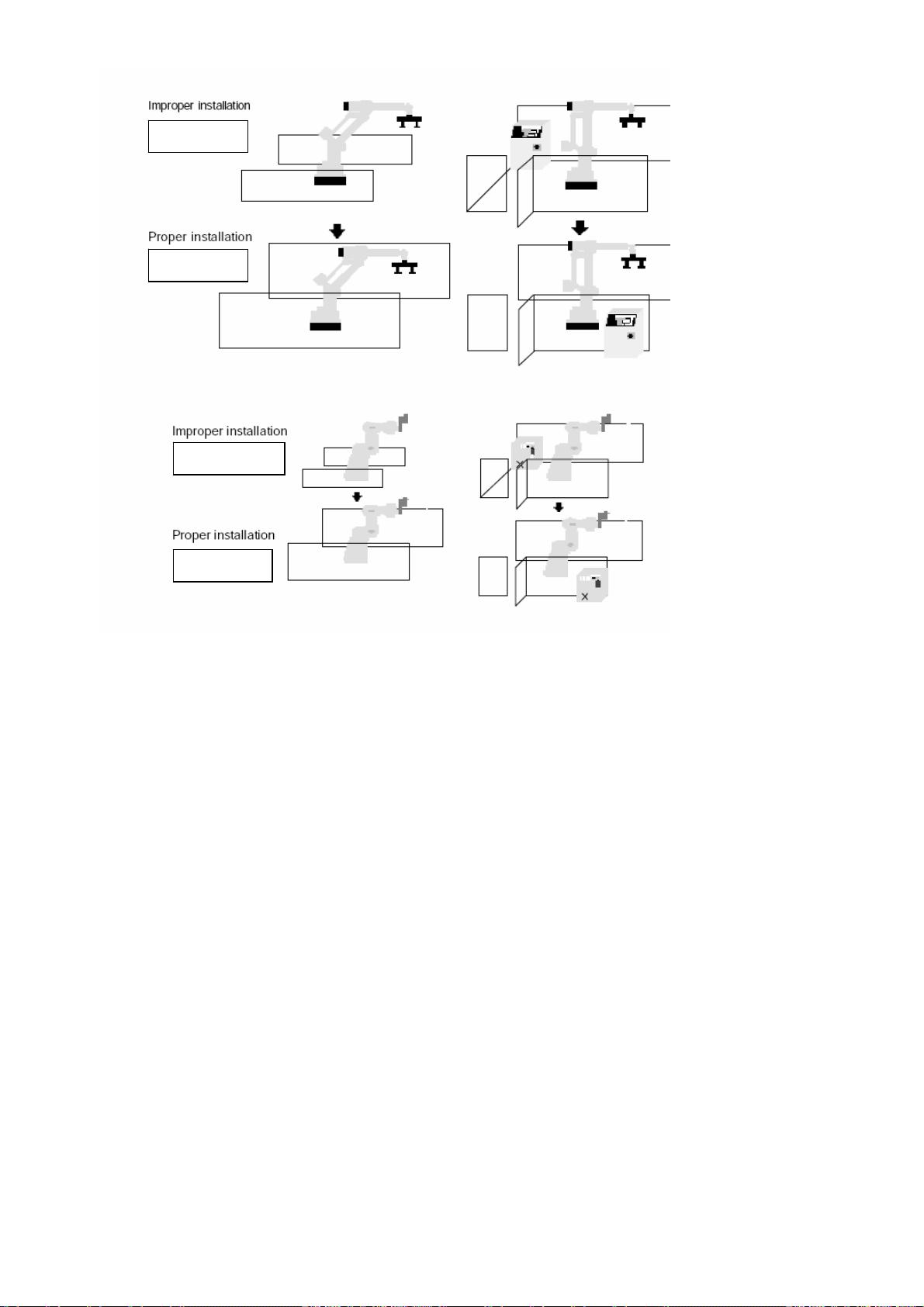
¾ 设置保护性的围栏,将机器人的动作范围环绕。此外,把控制器放置在保护性围栏的外
面。
剩余2486页未读,继续阅读

abyssus_2y
- 粉丝: 8
- 资源: 1
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 计算机系统基石:深度解析与优化秘籍
- 《ThinkingInJava》中文版:经典Java学习宝典
- 《世界是平的》新版:全球化进程加速与教育挑战
- 编程珠玑:程序员的基础与深度探索
- C# 语言规范4.0详解
- Java编程:兔子繁殖与素数、水仙花数问题探索
- Oracle内存结构详解:SGA与PGA
- Java编程中的经典算法解析
- Logback日志管理系统:从入门到精通
- Maven一站式构建与配置教程:从入门到私服搭建
- Linux TCP/IP网络编程基础与实践
- 《CLR via C# 第3版》- 中文译稿,深度探索.NET框架
- Oracle10gR2 RAC在RedHat上的安装指南
- 微信技术总监解密:从架构设计到敏捷开发
- 民用航空专业英汉对照词典:全面指导航空教学与工作
- Rexroth HVE & HVR 2nd Gen. Power Supply Units应用手册:DIAX04选择与安装指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


