
1 极点配置 PID 控制器的仿真实验
针对如下开环不稳定的非最小相位的被控对象
选取 ; ; 。
控 制 器 参 数 为 :
控制律为:
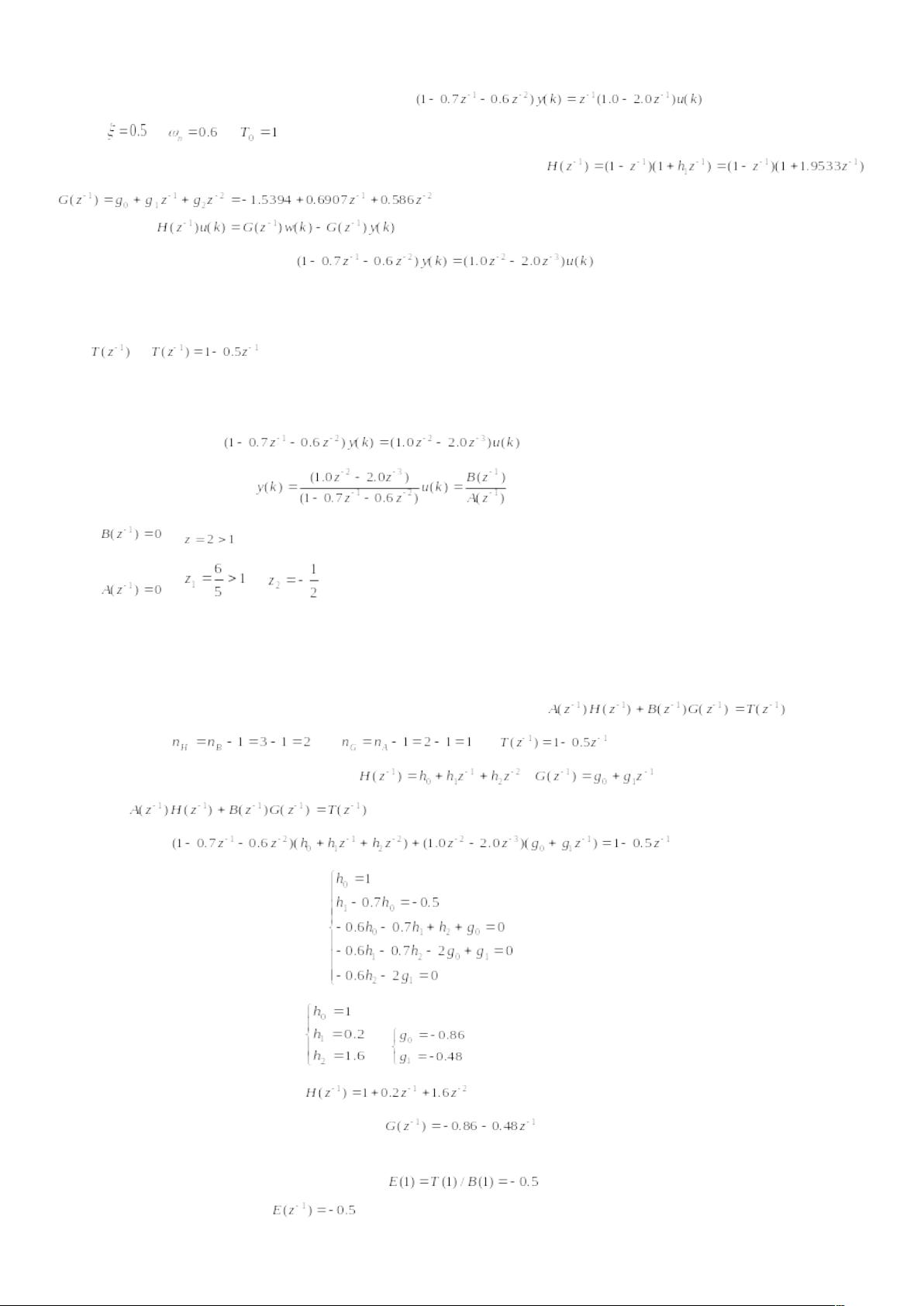
2 针对如下单输入单输出被控对象
(1)判断被控对象是最小相位的还是非最小相位的?是开环稳定的还是开环不稳定的?
(2)试用保留所有过程零点的极点配置方法设计极点配置控制器,其中参考输入选为如下方波
选择 为
要求:(1) 给出控制器参数多项式;
解:(1)判断被控对象是最小相位的还是非最小相位的?是开环稳定的还是开环不稳定的?
由
得
令 得 ,因此系统为非最小相位系统。
令 得 , ,因此系统为开环不稳定系统。
(2)方法一不加积分环节
①给出控制器参数多项式
保留所有过程零点的极点配置方法设计极点配置控制器,参考输入为给定方波.
采用保留过程全部零点的极点配置算法,此时的极点配置方程应写成
阶次限制关系为
由于
A ( z
−1
)
与
B ( z
−1
)
互质,上式一定有解。
带入方程
得
展开并整理得如下方程
解方程得
即 控制器参数方程
当不加积分器时,取
取















