

Can 总线资料
1 CAN 协议简介
CAN 是控制器局域网络(Controller Area Network)的简称,它是由研发和生产汽车电子产品
著称的德国 BOSCH 公司开发的,并最终成为国际标准(ISO11519),是国际上应用最广泛
的现场总线之一。
CAN 总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥
有以 CAN 为底层协议专为大型货车和重工机械车辆设计的 J1939 协议。近年来,它具有的
高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶
劣、电磁辐射强及振动大的工业环境。
1.1 CAN 物理层
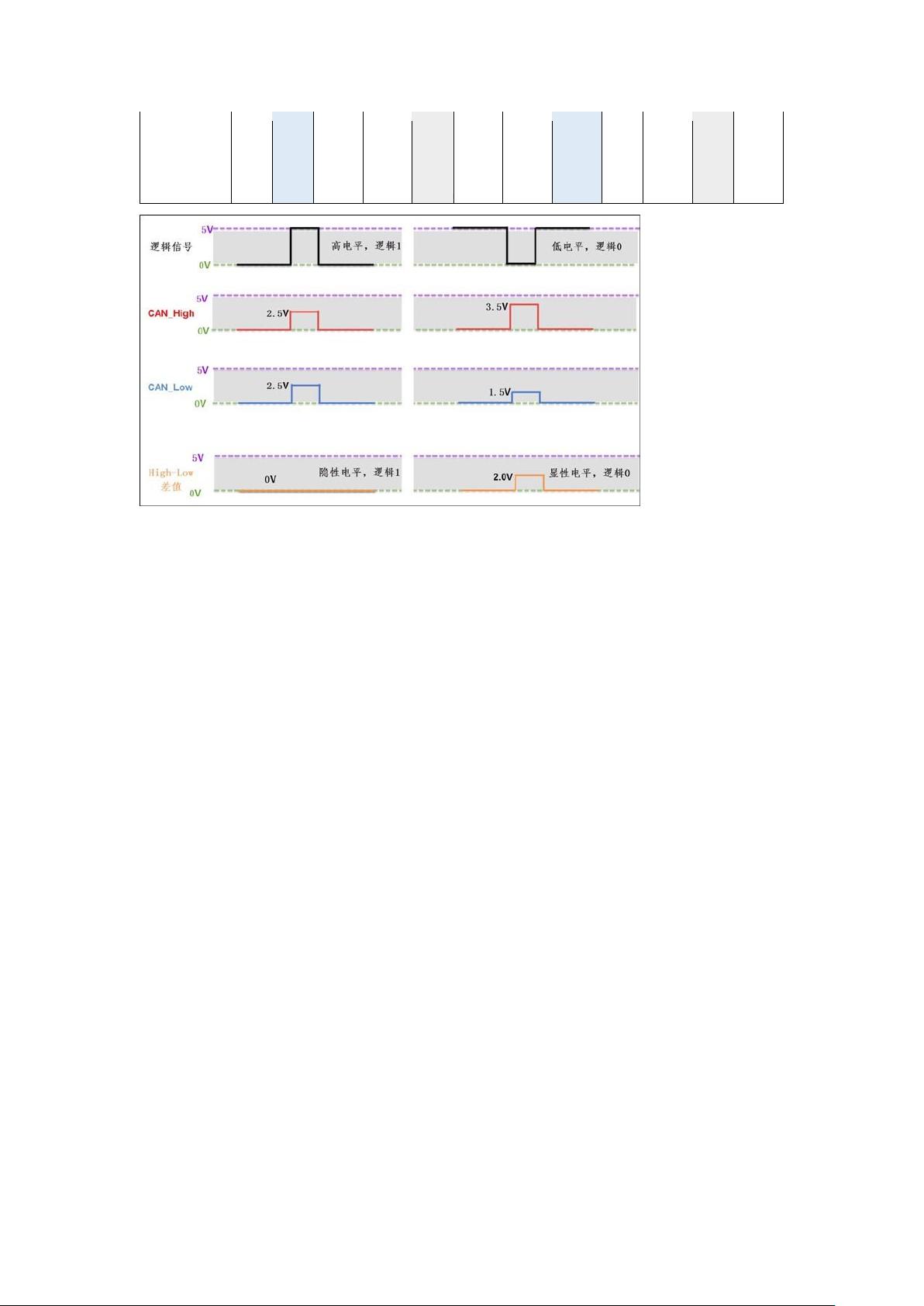
与 I2C、SPI 等具有时钟信号的同步通讯方式不同,CAN 通讯并不是以时钟信号来进行同步
的,它是一种异步通讯,只具有 CAN_High 和 CAN_Low 两条信号线,共同构成一组差分信
号线,以差分信号的形式进行通讯。
1. 闭环总线网络
CAN 物理层的形式主要有两种,图 401 中的 CAN 通讯网络是一种遵循 ISO11898 标准的高
速、短距离"闭环网络",它的总线最大长度为 40m,通信速度最高为 1Mbps,总线的两端各
要求有一个"120 欧"的电阻。
图 401 CAN 闭环总线通讯网络
2. 开环总线网络
图 402 中的是遵循 ISO11519-2 标准的低速、远距离"开环网络",它的最大传输距离为 1km,
最高通讯速率为 125kbps,两根总线是独立的、不形成闭环,要求每根总线上各串联有一个
"2.2 千欧"的电阻。



剩余32页未读,继续阅读

熊已出没
- 粉丝: 56
- 资源: 29
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0