
智能车电磁检测及控制算法的研究智能车电磁检测及控制算法的研究
在智能车传统PID、PD控制的基础上进行改进,提出了一种更为稳定快速的循迹控制方法。智能车的方向控制
和速度控制都具有非线性、大滞后的特点,传统的控制方法存在着响应时间不够及稳态误差大的缺点。通过电
磁传感器的合理设计,对路径信息和车体状态进行检测,并在此基础上引入基于模糊控制的变参数PD控制和变
结构控制。实验结果表明,与传统方法相比,智能车运行的稳定性和快速性都得到了很大的提高。
本文是以第五届“飞思卡尔”杯全国大学生智能汽车竞赛为背景。本届比赛新增加了电磁组的比赛,在50 cm宽的赛道中心铺
设有直径0.1~0.3 mm的导线,其中通有20 kHz,100 mA的交变电流。除此之外,在赛道的起跑线处还有永磁铁标志起跑
线的位置。车模要通过自动识别导线所产生的电磁场进行路径检测。
从道路元素来看,赛道一般可以分成直道、转弯、S道、回环道等形式。在智能车行驶的过程中,为了选择最佳路径,减少
行驶距离,在转弯处最好选择内切,小S弯甚至可以近似的走成直线。但是由于电磁传感器的局限性,不可能像摄像头一样检
测到前方赛道的全貌,这就要求在算法上有所突破。
1 智能车系统的硬件组成
1.1 整体硬件结构介绍
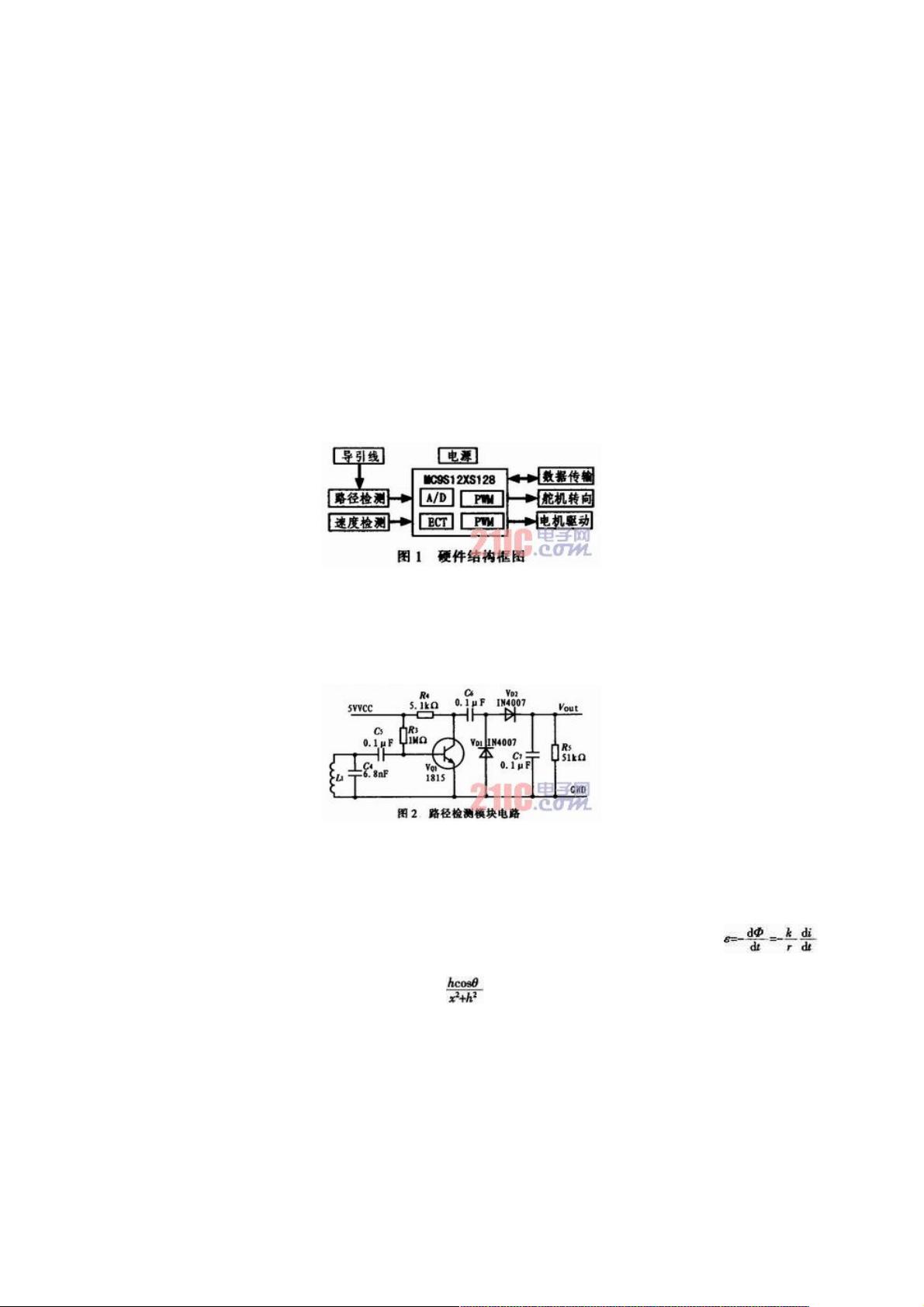
图1所示为智能车控制系统的硬件框图。系统采用飞思卡尔半导体公司的16位微处理器MC9S12XS128作为核心控制芯片,
设计最小系统模块;外围电路包括路径检测模块,速度检测模块,舵机转向模块,电机驱动模块;电源模块为整个系统提供动
力支持。其中速度检测模块采用光电编码器采集信号,并通过微控制器的ECT模块进行脉冲捕捉计数,测得速度值;电机驱动
采用H桥,可实现电机的正反转及制动。
1.2 电磁传感器的设计
根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。本智能车选用工字型10 mH电感作为磁场感应传感器。这
类电感体积小,Q值高,具有开放的磁芯,可以灵敏的感应周围交变的磁场,产生响应感应电动势。图2所示为路径检测模块
电路图,这里只为其中的一路。
电路中L1为10 mH电感;C4为6.8 nF的谐振电容,实现20 kHz信号的选频电路;Vout为感应电动势输出端。传感器模块
伸出车体约10 cm,距离地面8 cm。
由毕奥-萨伐尔定律知,通有稳恒电流的直导线周围会产生磁场,感应磁场分布是以导线为轴的一系列同心圆。圆上磁场强
度大小相同,并随着距离导线的径增加成反比下降。
通电导线周围的磁场是一个矢量场。在本设计中,根据法拉第电磁感应定律,感应电动势可近似为: 。k为比
例系数,与线圈摆放方法、线圈面积和一些物理常量有关。感应电动势的方向可用楞次定律来确定。对于放置在导线上方h
处,与导线水平距离为x的线圈中产生的感应电动势的大小与 成正比。θ是传感器所在平面与导线的夹角。
图3所示为车模与赛道位置示意图,车体前部即为路径检测模块。α为车体相对于导线的偏移角度,d为车体相对于导线的偏
离距离(垂直与车体中心线的横向距离)。在车模行驶的过程中,每个电感线圈距离导线的距离不同,夹角也不同,因此输出的
感应电动势大小不同。

weixin_38546846
- 粉丝: 5
- 资源: 920
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- zigbee-cluster-library-specification
- JSBSim Reference Manual
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0