
电流型电流型PWM控制芯片控制芯片UC3844的基本原理的基本原理
由于结构上有电压环、电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有
提高,是目前比较理想的新型PWM控制器。
UC3844是美国Unitrode公司(已被TI公司收购)生产的高性能电流型脉宽调制器(PWM)控制器。早期的PWM控制器是电
压控制型的,常用的电压型PWM控制器有TL494、TL495、SG3524、SG3525等。电压型PWM是指控制器按反馈电压来调节
输出脉宽,电流型PWM是指控制器按反馈电流来调节输出脉宽。
电流型PWM是在脉宽比较器的输入端,直接用流过输出电感线圈电流的信号与误差放大器输出信号进行比较,从而调节占空
比,使输出的电感峰值电流跟随误差电压变化而变化。由于结构上有电压环、电流环双环系统,因此,无论开关电源的电压调
整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型PWM控制器。
电流型PWM
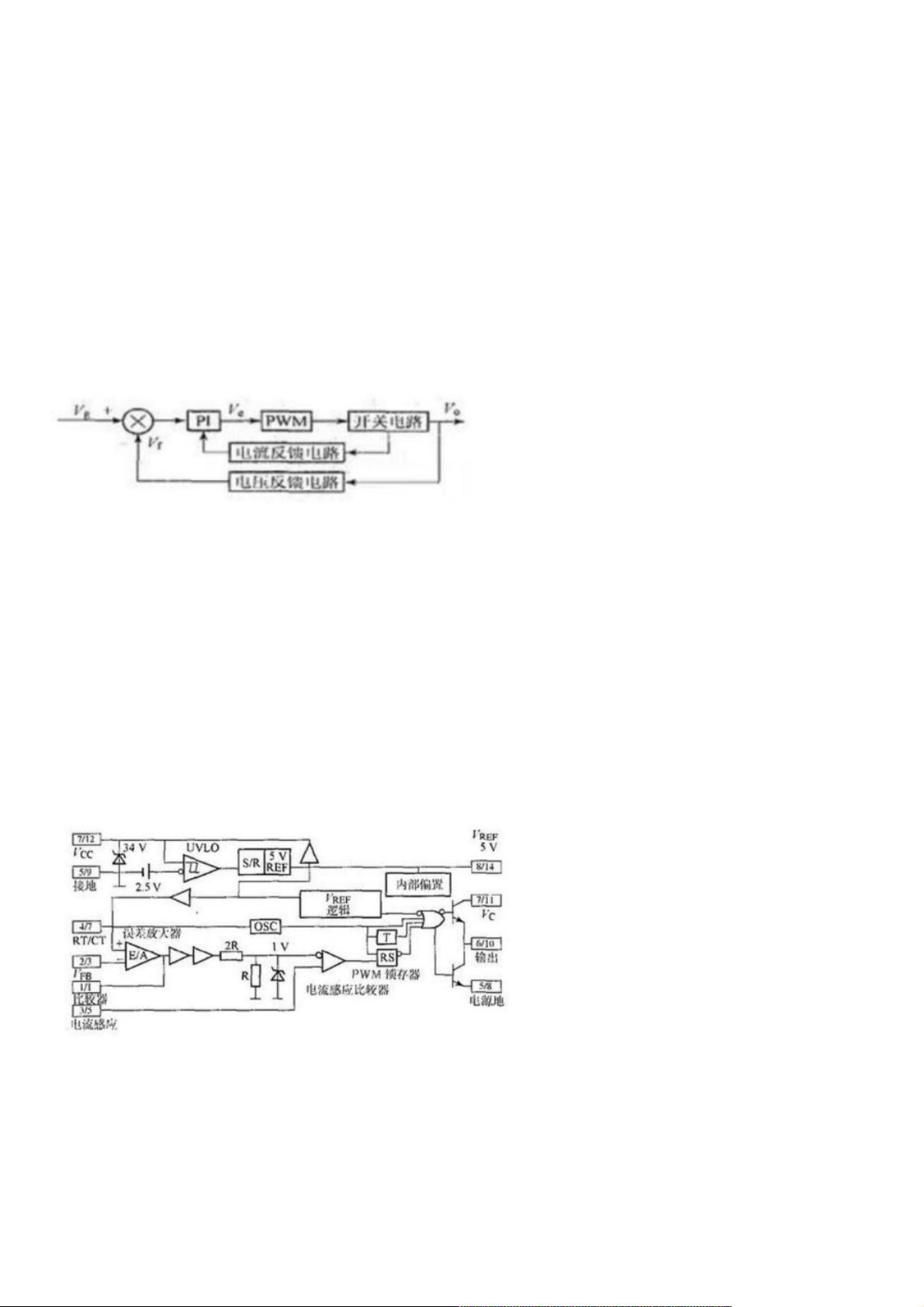
电流型PWM正是针对电压PWM型的缺点发展起来的。它在原有的电压环上增加了电流反馈环节,构成电压电流双闭环控制。
内环为电流控制环,外环为电压控制环。无论电流的变化,还是电压的变化,都会使PWM输出脉冲占空比发生变化。这种控
制方式可改善系统的电压调整率,提高系统的瞬态响应速度,增加系统的稳定性。其控制系统框图如图2所示。
电流型PWM控制的优点 如下:
a) 电压调整率好。输入电压的变化立即引起电感电流的变化,电感电流的变化立即反映到电流控制回路而被抑制。不像电压
控制要经过输出电压反馈到误差放大器,然后再调节的复杂过程,所以响应快。如果输入电压的变化是持续的,电压反馈环也
起作用,因而可以达到较高的线形调整率。
b) 负载调整率好。由于电压误差放大器可专门用于控制占空比,以适应负载变化造成的输出电压的变化,因而可大大改善负
载调整率。
c) 系统稳定性好。从控制理论的角度讲,电压控制单闭环系统是一个无条件的二阶稳定系统。而电流控制双闭环系统是一个
无条件的一阶稳定系统,系统稳定性好。
电流型PWM控制芯片UC3844的基本原理
UC3844是电流型单端输出式PWM,其最大占空比为50%,启动电压16V ,具有过压保护和欠压锁定功能。当工作电压大于
34V时,稳压管稳压,使内部电路在小于34V电压下可靠工作;当输入电压低于10V时,芯片被锁定,控制器停止工作。其内部
框图和引脚图如图3所示。
图3 UC3844 内部框图及引脚图
在图3中,反馈电压和2.5V基准电压之差,经误差放大器E/A放大后作为门限电压,与反馈电流经采样后的电压,一起送到电
流感应比较器。当电流取样电压超过门限电压后,比较器输出高电平触发RS 触发器,然后经或非门输出低电平,关断功率
管,并保持这种状态直至振荡器输出脉冲到触发器和或非门为止。这段时间的长短由振荡器输出脉冲宽度决定。PWM信号的
上升沿由振荡器决定,下降沿由功率开关管电流和输出电压共同决定。反转触发器限制PWM 的占空比调节范围在0~50%之
内.UC3844的振荡工作频率由引脚4与引脚8之间所接定时电阻RT、引脚4与地之间所接定时电容CT设定。计算公式为:
f=1/T=RTCT/0.55=1.72RTCT。
引脚2是电压反馈端,将取样电压加至E/A误差放大器的反相输入端,与同向输入端的2.5V基准电压进行比较,产生误差电
压。利用内部E/A误差放大器可以构成电压环。引脚3是电流反馈端,电流取样电压由引脚3输入到电流比较器。当引脚3 电压
大于1V时,输出关闭。利用引脚3和电流比较器可以构成电流环。引脚1是补偿端,外接阻容元件以补偿误差放大器的频率特

weixin_38629976
- 粉丝: 7
- 资源: 972
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- 计算机系统基石:深度解析与优化秘籍
- 《ThinkingInJava》中文版:经典Java学习宝典
- 《世界是平的》新版:全球化进程加速与教育挑战
- 编程珠玑:程序员的基础与深度探索
- C# 语言规范4.0详解
- Java编程:兔子繁殖与素数、水仙花数问题探索
- Oracle内存结构详解:SGA与PGA
- Java编程中的经典算法解析
- Logback日志管理系统:从入门到精通
- Maven一站式构建与配置教程:从入门到私服搭建
- Linux TCP/IP网络编程基础与实践
- 《CLR via C# 第3版》- 中文译稿,深度探索.NET框架
- Oracle10gR2 RAC在RedHat上的安装指南
- 微信技术总监解密:从架构设计到敏捷开发
- 民用航空专业英汉对照词典:全面指导航空教学与工作
- Rexroth HVE & HVR 2nd Gen. Power Supply Units应用手册:DIAX04选择与安装指南
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


