
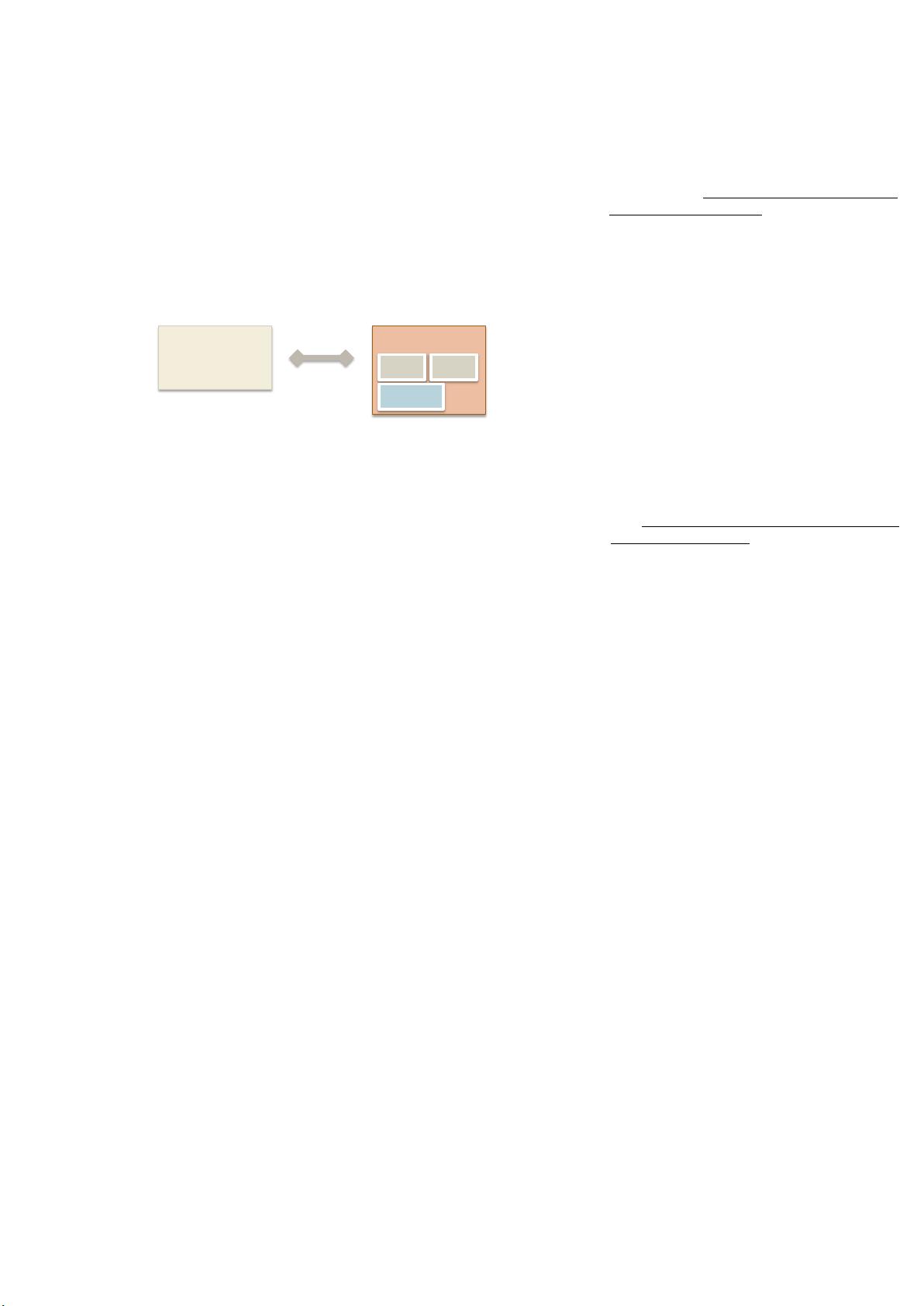
Figure 3: Overview of a co-simulation FMU, note that the solver in this case is within the
FMU.
The FMI standard specifies methods for interacting with a model, providing
variable values and retrieving values. Methods for computing the derivatives,
setting states and time are available for model exchange and for co-simulation,
a method for performing an internal step are available. Furthermore, there are
specific methods for initialization of a model. The interface is light-weight and
much of the information about the internals are contained in the metadata, i.e.
the XML file inside the FMU, which needs to be made available.
The standard describes a model exchange FMU with the following underlying
mathematical representation,
˙x = f(t, x, u; p, d) (1a)
y = g(t, x, u; p, d) (1b)
where t is the time, x are the continuous states, u are the inputs, p are the
parameters and d are the discrete variables that are kept constant between
events. Furthermore, y are the outputs. Additionally, the standard supports
different types of events which can impact the model behavior. The three events
are:
• State Events
These events are dependent on the state solution profiles and thus not
known a prior. The model provides a set of event indicators, z, that the
integrator monitors during the integration process,
4
DLL XML
FMU
Tool
SolvSolverer
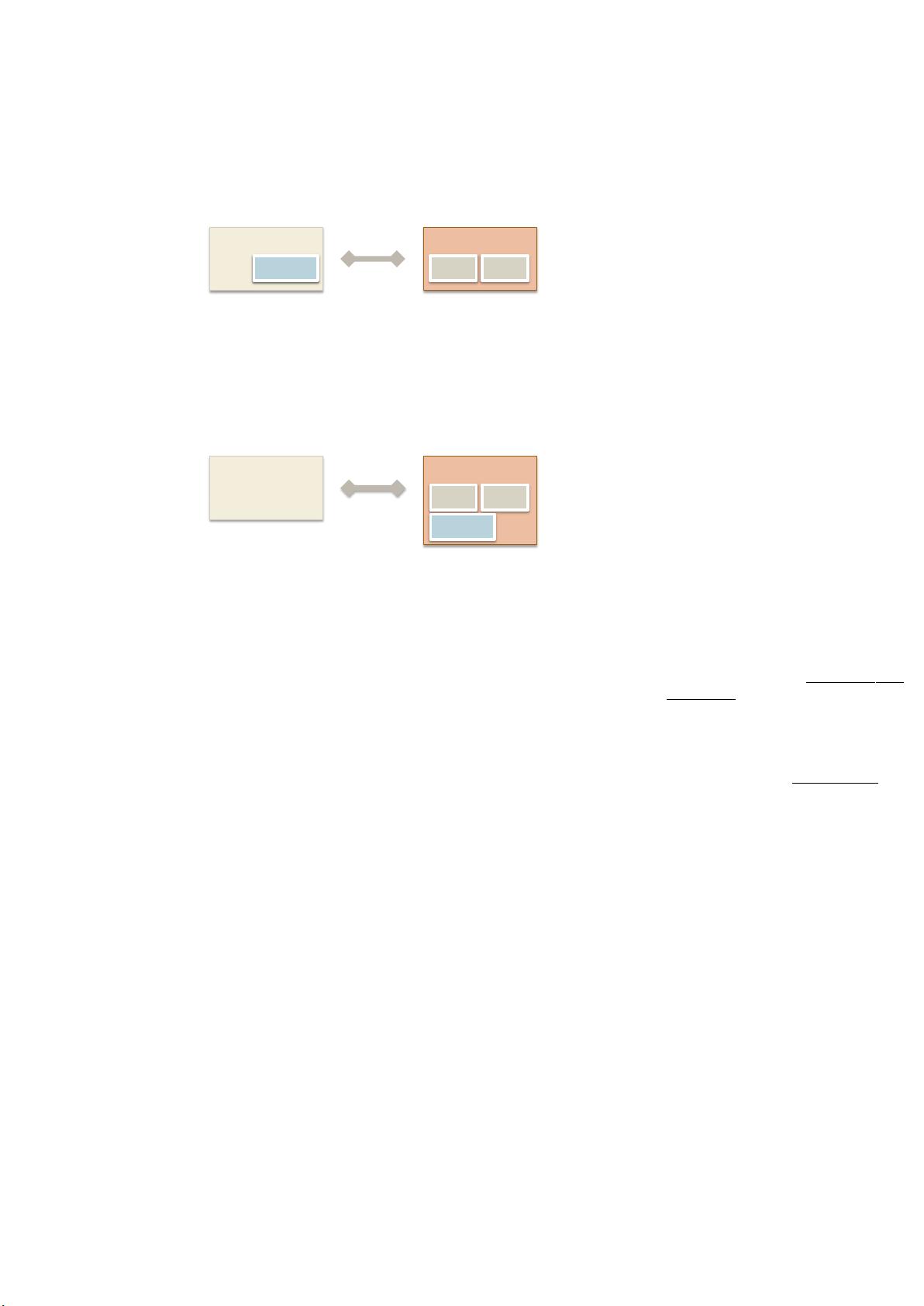
Figure 2: Overview of a model exchange FMU, note that an external solver is required by the
tool in order to solve the model.
DLL XML
FMU
Tool
Solver
FMI标准规定了与模型交互、提供变
量值和检索值的方法。用于计算导数,
设置状态和时间的方法可用于模型交换
和协同仿真,用于执行内部步骤的方法
是可用的。此外,还有用于初始化模型
的特定方法。接口轻量化,大部分内部
信息都包含在元数据中,即FMU内部的
XML文件,这个是必要的。
该标准描述了一个模型交换FMU具有
以下基本数学表示,
其中
t
是时间,
x
是连续状态,
u是输入,p
是参数,
d
是在事件之间保持不变的离散
变量。
此外,
y
是输出。 此外,该标准支
持可能影响模型行为的不同类型的事件。
这三个事件是:
•状态事件
这些事件取决于状态解决配置,因此不
为先验所知。 该模型提供了一组事件指
标z,集成商在集成过程中监控这些指
标:

剩余45页未读,继续阅读















