
下,脉冲测速功率较大,系统比相位法简单,易实现,更易于操作,整个系统较其他方法
易达到使用者需求。因此,应用在交通控制如电子警察方面,脉冲测速法无疑是最好的一
种方法。
但是,不管脉冲法还是相位法,激光测速系统对于测量角度要求非常高,测速系统应
该正对运动物体的运动方向,测量偏差角度应该小于 10o,这样才能保证准确测量。如图
1 所示。a
图 1、激光测速系统测量角度示意图
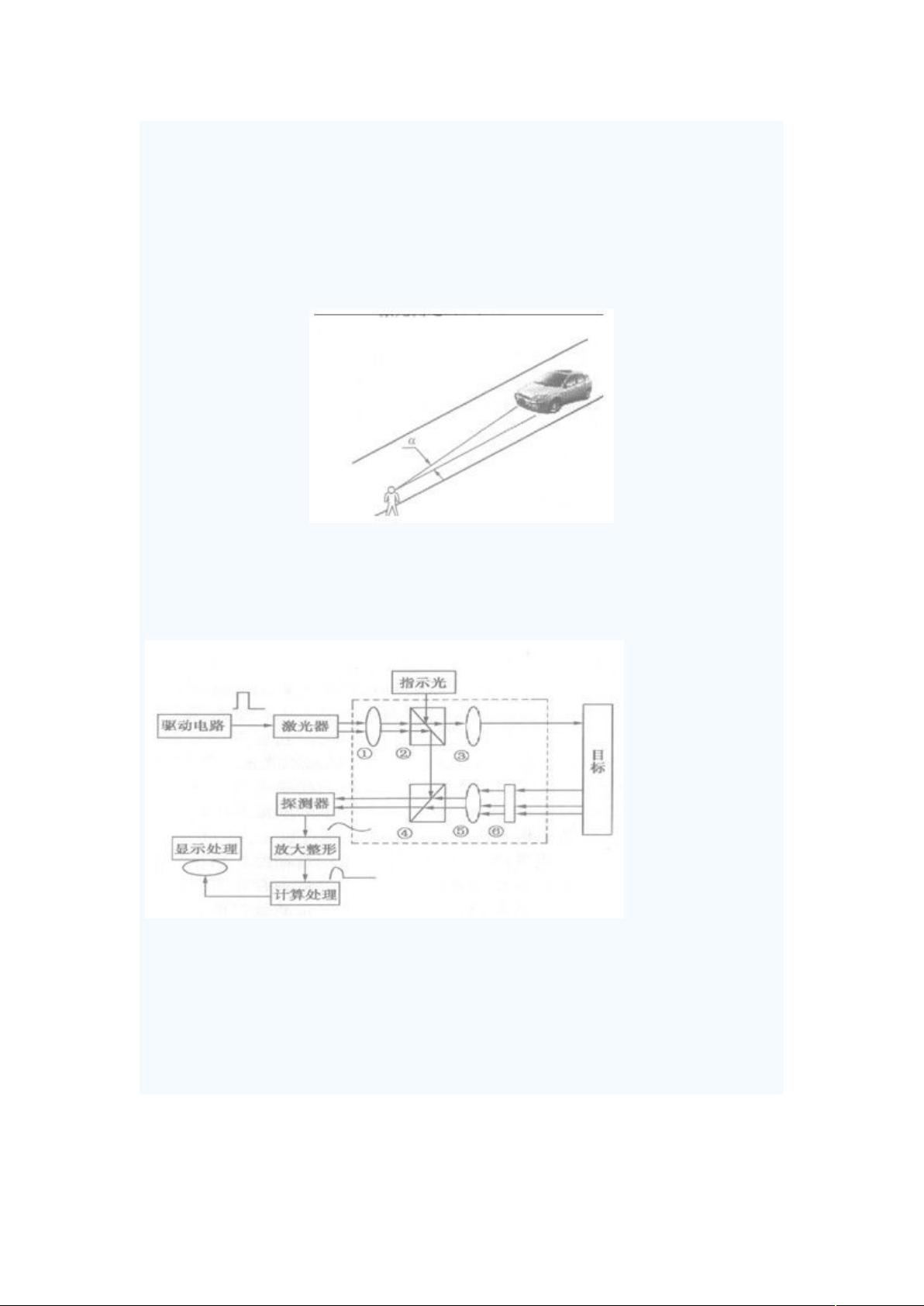
激光脉冲测速系统的总体结构框图如图 2 所示。
图 2、激光脉冲测速系统的总体结构框图
激光脉冲测速系统主要由光学系统、硬件电路与软件处理 3 大部分组成。其中,光学系统
部分由光学准自部分、分光系统组成;硬件电路部分由发射模块(包括脉冲驱动电路)、接
收模块(包括信号放大、整形滤波、计数电路)、计算机接口电路组成;软件处理部分由
CPLD 脉冲驱动、计数程序和单片机串口程序,以及与上位机通信处理部分组成。
剩余12页未读,继续阅读















