舵机控制技术:PWM信号与调速算法解析
下载需积分: 32 | PDF格式 | 289KB |
更新于2024-07-28
| 108 浏览量 | 举报
“舵机控制原理”
舵机控制原理主要涉及脉宽调制(PWM)信号的应用,这是一种在机器人和模型行业中广泛使用的通信协议。PWM信号的特点在于其上升沿到下降沿之间的持续时间,即脉宽,它决定了舵机的动作。在传统模型行业中,舵机遵循特定的时间宽窄协议,但随着机器人技术的发展,一些新型舵机开始采用专用的协议,限制了它们在传统应用中的兼容性。
北京汉库的HG14-M舵机是这种过渡时期的代表,它沿用了传统的PWM协议。这种舵机的优点包括成本低廉、产业成熟以及能够实现大角度旋转(可达185度)。然而,由于采用PWM格式,其控制机制相对复杂。作为一款数字舵机,HG14-M对PWM信号的要求较低,它允许非实时指令接收,且具备位置自锁和跟踪功能,超越了普通步进电机。
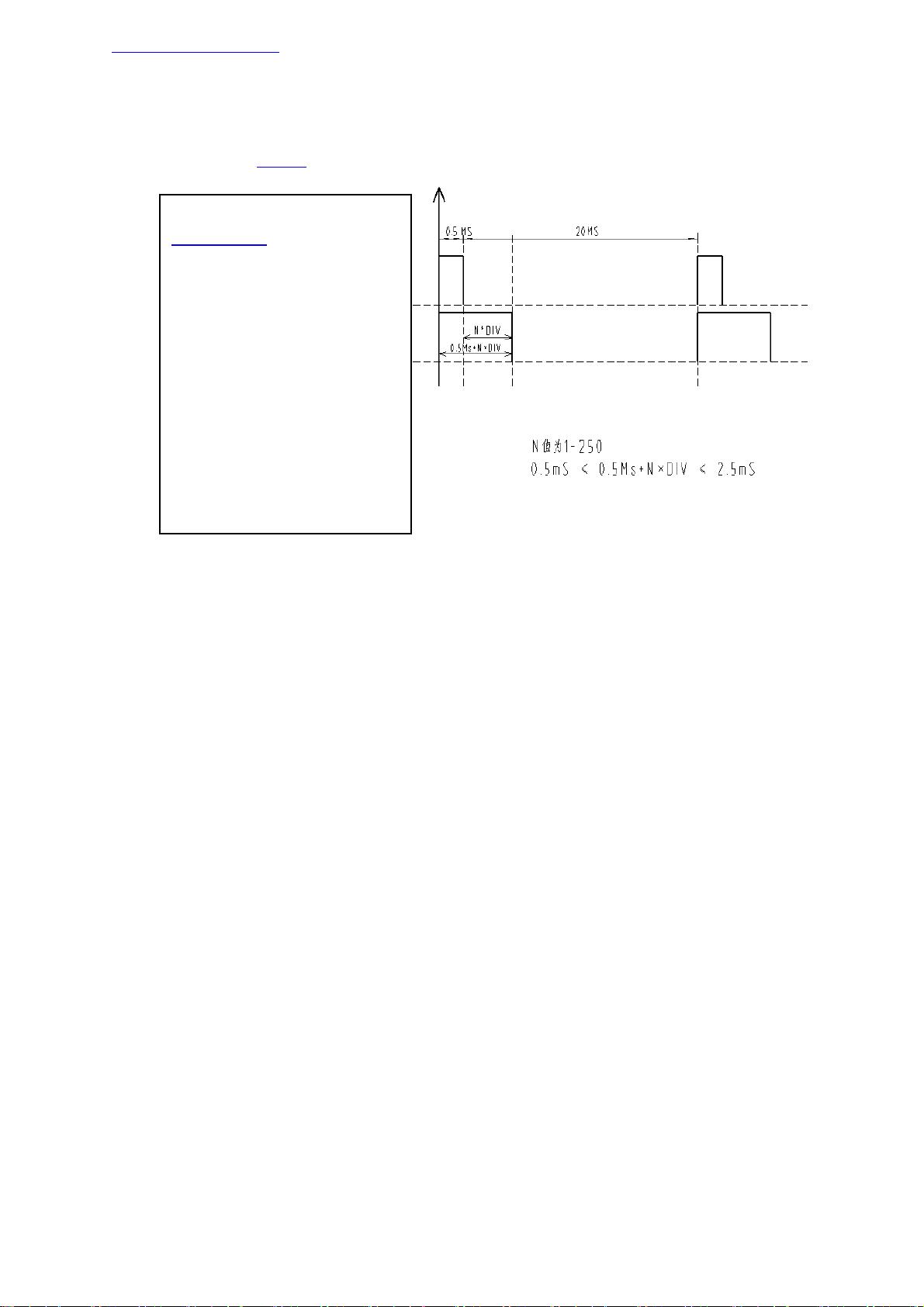
对于PWM信号,有以下几个关键点需要注意:
1. 上升沿至少为0.5毫秒,脉宽可以在0.5毫秒至2.5毫秒之间变化。
2. HG14-M舵机的下降沿时间没有严格要求,通常0.5毫秒即可。
3. 对于像HG0680这样的塑料齿轮模拟舵机,需要持续提供PWM信号,一个1毫秒周期的标准方波就能使其表现出良好的跟随性能。
在单舵机控制中,舵机通常被用作随动机构。例如,HG14-M舵机的位置控制通过调整PWM脉宽来实现,而其运动协议则涉及到如何精确地按照预设路径移动。为了实现调速,可以使用不同的算法,包括考虑舵机的转动极限和下降沿的PWM脉宽。
当涉及到多舵机联动,比如8舵机联动的情况,需要设计复杂的PWM指令算法来确保同步性。这包括明确控制要求,注意信号间的协调,以及解决扫尾问题,即最后一个舵机的运动可能会影响到整个系统的同步。扫尾值的计算和处理是确保所有舵机在完成一个周期动作后能够回到初始位置的关键。
舵机控制涉及到PWM信号的精准控制,舵机特性的理解和利用,以及在多舵机系统中的协同工作算法。理解这些原理对于电子技术和机器人工程至关重要,能够帮助设计出更高效、更精确的控制系统。
2.PWM信号控制精度制定
我们采用的是 8 位
AT89C52CPU
,其数据分辨率为
256,那么经过舵机极限参数实
验,得到应该将其划分为 250 份。
那么 0.5mS---2.5Ms 的宽度
为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM 的控制精度为 8us
我们可以以 8uS 为单位递增
控制舵机转动与定位。
舵机可以转动 185 度,那么
185 度÷250=0.74 度,
则:舵机的控制精度为 0.74 度
图 1-2
1 D
IV
= 8uS ; 250DIV=2mS
时基寄存器内的数值为:(#01H)01 ----(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。
则:185÷250 = 0.74 度 / DIV
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
2 / 15
2
电子信息行业导航网站,电子技术工程师的上网主页!
http://www.dianzishijia.com
剩余14页未读,继续阅读
相关推荐





sxyongustc
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
