
415
13.1
l
Region Features
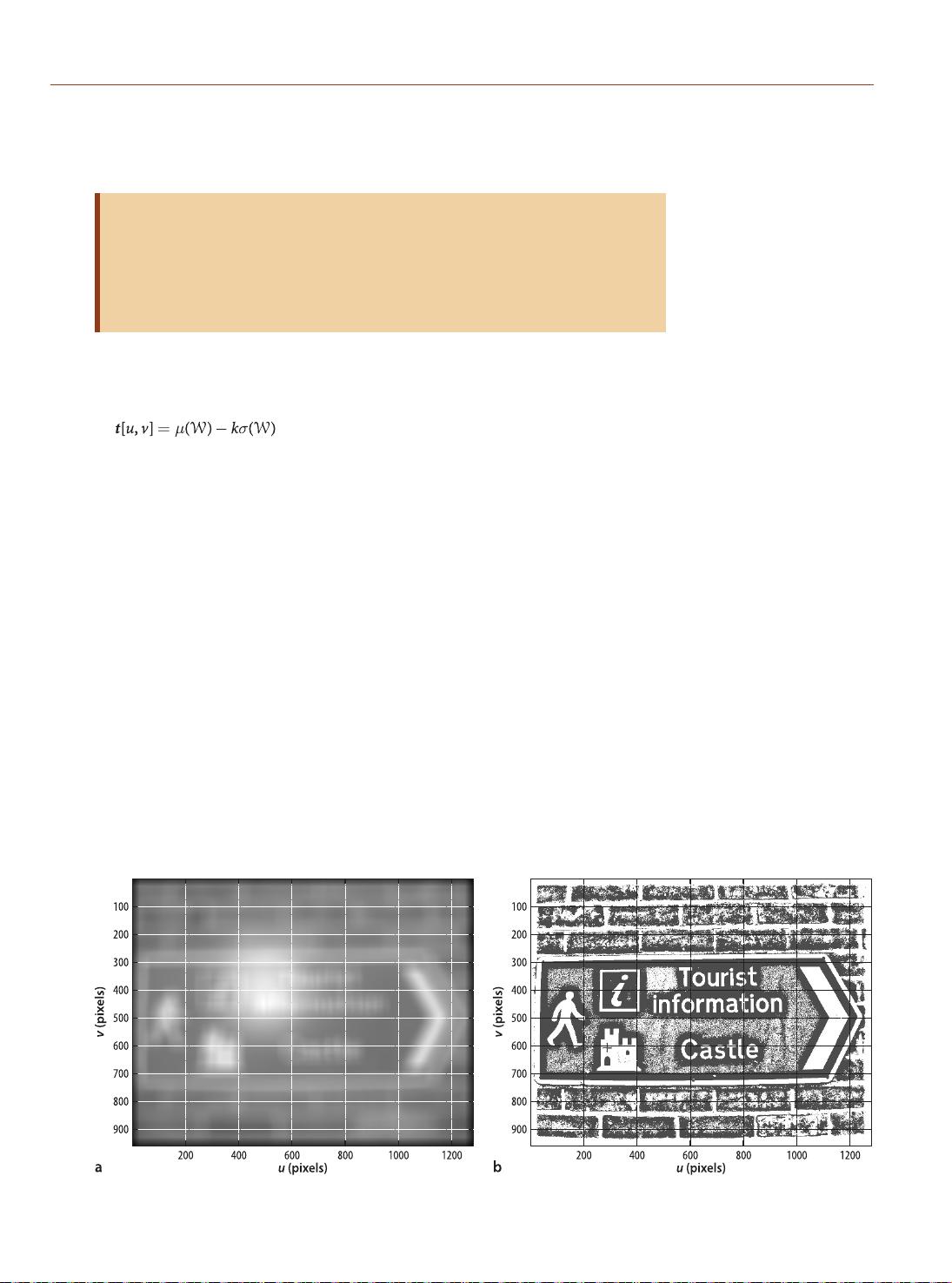
Image segmentation is the process of partitioning an image into application meaning-
ful regions as illustrated in Fig. 13.1. The aim is to segment or separate those pixels
that represent objects of interest from all other pixels in the scene. This is one of the
oldest approaches to scene understanding and while conceptually straightforward it
is very challenging in practice. A key requirement is robustness which is how grace-
fully the method degrades as the underlying assumptions are violated, for example
changing scene illumination or viewpoint.
Image segmentation is considered as three subproblems. The fi rst is classifi ca-
tion which is a decision process applied to each pixel that assigns the pixel to one of
C classes c ∈ {0 C − 1}. Commonly we use C = 2 which is known as binary classifi -
cation or binarization and some examples are shown in Fig. 13.1a–c. The pixels have
been classifi ed as object (c = 1) or not-object (c = 0) which are displayed as white
or black pixels respectively. The classifi cation is always application specifi c – for ex-
ample the object corresponds to pixels that are bright or yellow or red or moving.
Figure 13.1d is a multi-level classifi cation where C = 28 and the pixel’s class is refl ect-
ed in its displayed color.
The underlying assumption in the examples of Fig. 13.1 is that regions are homoge-
neous with respect to some characteristic such as brightness, color or texture. In prac-
tice we accept that this stage is imperfect and that pixels may be misclassifi ed – sub-
sequent processing steps will have to deal with this.
The second step in the segmentation process is representation where adjacent pixels
of the same class are connected to form spatial sets S
1
… S
m
. The sets can be represent-
ed by assigning a set label to each pixel or by a list of pixel coordinates that defi nes the
boundary of the connected set. In the third and fi nal step, the sets S
i
are described in
terms of compact scalar or vector-valued features such as size, position, and shape.
13.1.1
l
Classification
The pixel class is represented by an integer c ∈ {0 C − 1} where C is the number
of classes. In this section we discuss the problem of assigning each pixel to a class.
In many of the examples we will use binary classifi cation with just two classes corre-
sponding to not-object and object, or background and foreground.
13.1.1.1
l
Grey-Level Classification
A common approach to binary classifi cation of pixels is the monadic operator
where the decision is based simply on the value of the pixel I. This approach is called
thresholding and t is referred to as the threshold.
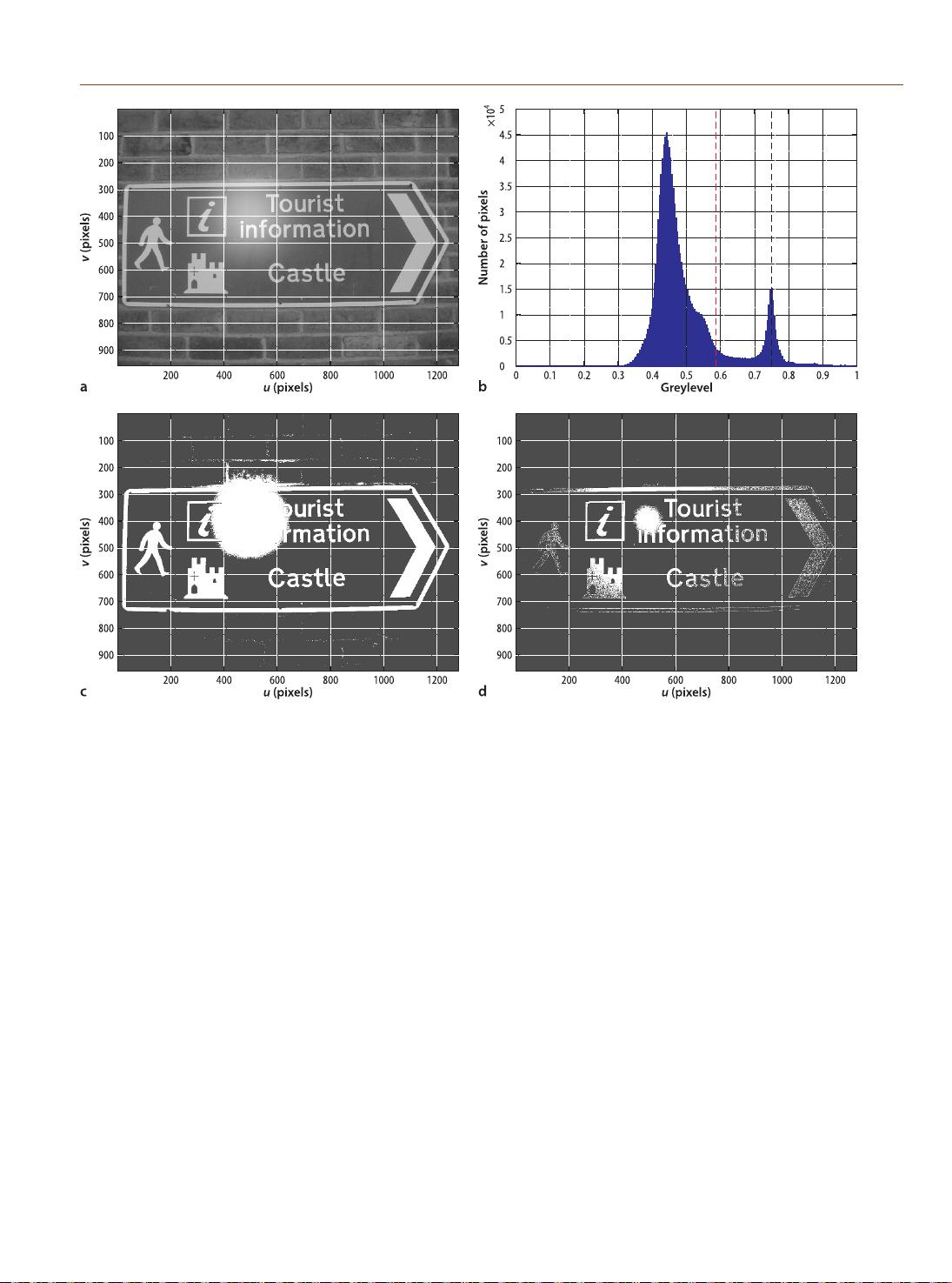
Thresholding is very simple to implement. Consider the image
>> castle = iread('castle.png', 'double');
which is shown in Fig. 13.2a. The thresholded image
>> idisp(castle >= 0.7)
is shown in Fig. 13.2c. The pixels have been quite accurately classifi ed as corresponding
to white paint or not. This classifi cation is based on the seemingly reasonable assump-
tion that the white paint objects are brighter than everything else in the image.
Fig. 13.1.
Examples of pixel classifi cation.
The left-hand column is the in-
put image and the right-hand
column is the classifi cation. The
classifi cation is application spe-
cifi c and the pixels have been
classifi ed as either object (white)
or not-object (black). The ob-
jects of interest are a the indi-
vidual letters on the sign; b the
yellow targets; c the red toma-
toes. d is a multi-level segmen-
tation where pixels have been
assigned to 28 classes that rep-
resent locally homogeneous
groups of pixels in the scene
13.1 · Region Features



 我的内容管理
展开
我的内容管理
展开







