
2. 项目设计过程
2.1 系统建模
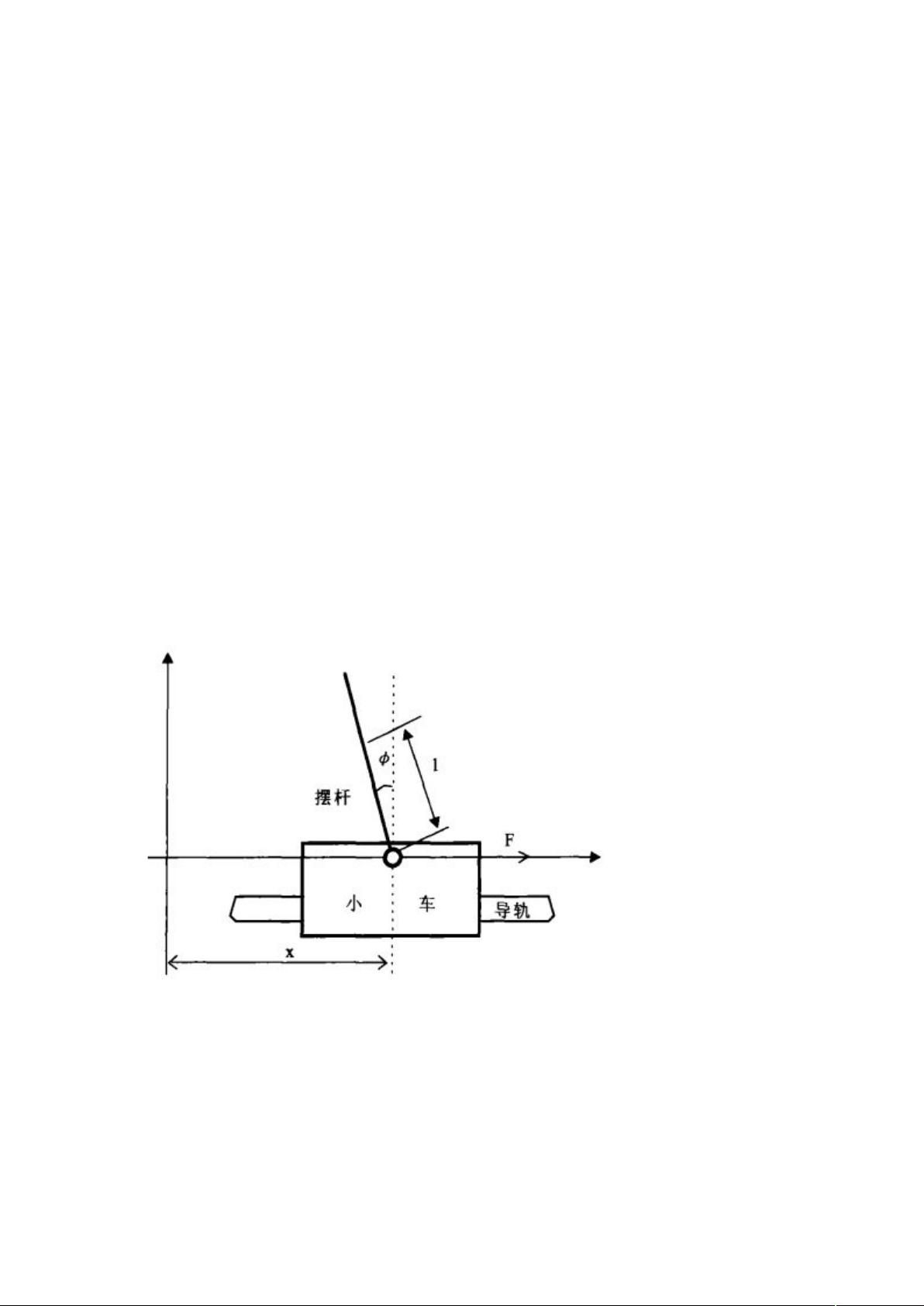
2.1.1 微分方程的推导
图 2.1 是小车倒立摆的摆杆/小车系统的受力图。我们不妨取小车质量为 M=2kg,
摆杆质量 m=1kg,摆杆长度 l=1m。作为研究对象,我们需要做出如下假设:
(1)摆杆为刚体
(2)忽略摆杆与支点之间的摩擦
(3)忽略小车与导轨之间的摩擦
图 2-2 小车倒立摆物理模型图
M:小车质量
m:为摆杆质量
3
剩余24页未读,继续阅读

xiaobaijinhuaji
- 粉丝: 11
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


