针孔相机模型与三维重建:Cv相机定标详解
"Cv照相机定标和三维重建"
在计算机视觉领域,照相机定标和三维重建是两个关键的概念,用于理解和模拟真实世界场景在二维图像中的表示。照相机定标是确定照相机内部参数的过程,而三维重建则涉及从多个视角恢复场景的三维结构。
照相机定标主要是为了获取照相机的内参数矩阵(A),其中包括焦距(fx, fy)和基准点(cx, cy)。这个过程通常包括识别并追踪特征点,如棋盘格,通过计算这些特征点在图像中的投影误差来估计内参数。内参数矩阵不仅包括焦距和基准点,还可能考虑镜头的畸变,如径向畸变(k1, k2)和切向畸变(p1, p2)。这些参数对于精确地将三维空间中的点映射到二维图像上至关重要。
三维重建则涉及到如何从多个视图中重建场景的几何结构。这通常需要知道照相机的外参数,即旋转和平移矩阵([R|t]),它们描述了照相机相对于场景的位置和方向。通过匹配不同视图中同一物体的特征点,并利用这些匹配的对应关系,可以求解出照相机的外参数以及场景的三维点坐标。一种常见的方法是基于立体匹配的三角测量,或是使用结构光、深度传感器等辅助设备。
OpenCV库提供了丰富的函数来支持这两个过程。例如,`cvProjectPoints2`函数可以用于根据给定的内参数和外参数,将三维点投影到图像平面上。反过来,`cvCalibrateCamera`或`cvFindExtrinsicCameraParams2`可以用来估计外参数,给定一些已知三维点及其在图像上的对应位置。
此外,`cv::calibrateCamera`函数用于计算照相机的内参数和外参数,通常使用多张包含已知几何结构的图像(如前面提到的棋盘格)。该函数会优化内在参数,校正镜头畸变,并计算每张图像的外参数,从而实现全面的照相机定标。
在实际应用中,照相机定标和三维重建技术广泛应用于机器人导航、自动驾驶、虚拟现实、无人机、工业检测等领域。通过精确的定标,可以提高计算机视觉系统的准确性和可靠性;而三维重建则能够为我们提供数字世界的立体模型,为各种应用提供基础数据。
理解并掌握照相机定标和三维重建技术,对于从事计算机视觉研究和开发的人员来说,是至关重要的。通过OpenCV等工具,我们可以有效地实现这些复杂的计算,从而将理论知识转化为实际的解决方案。
函数 )*&+)&' , 通过给定的内参数和外参数计算三维点投影到二维图
像平面上的坐标。另外,这个函数可以计算关于投影参数的图像点偏导数的雅
可比矩阵。雅可比矩阵可以用在 !.2'0*.!.3*. 和
;' (<*' ,'!.3*.).*.3, 函数的全局优化中。这个函数也可以用来
计算内参数和外参数的反投影误差。注意,将内参数和(或)外参数设置为特
定值,这个函数可以用来计算外变换(或内变换)。
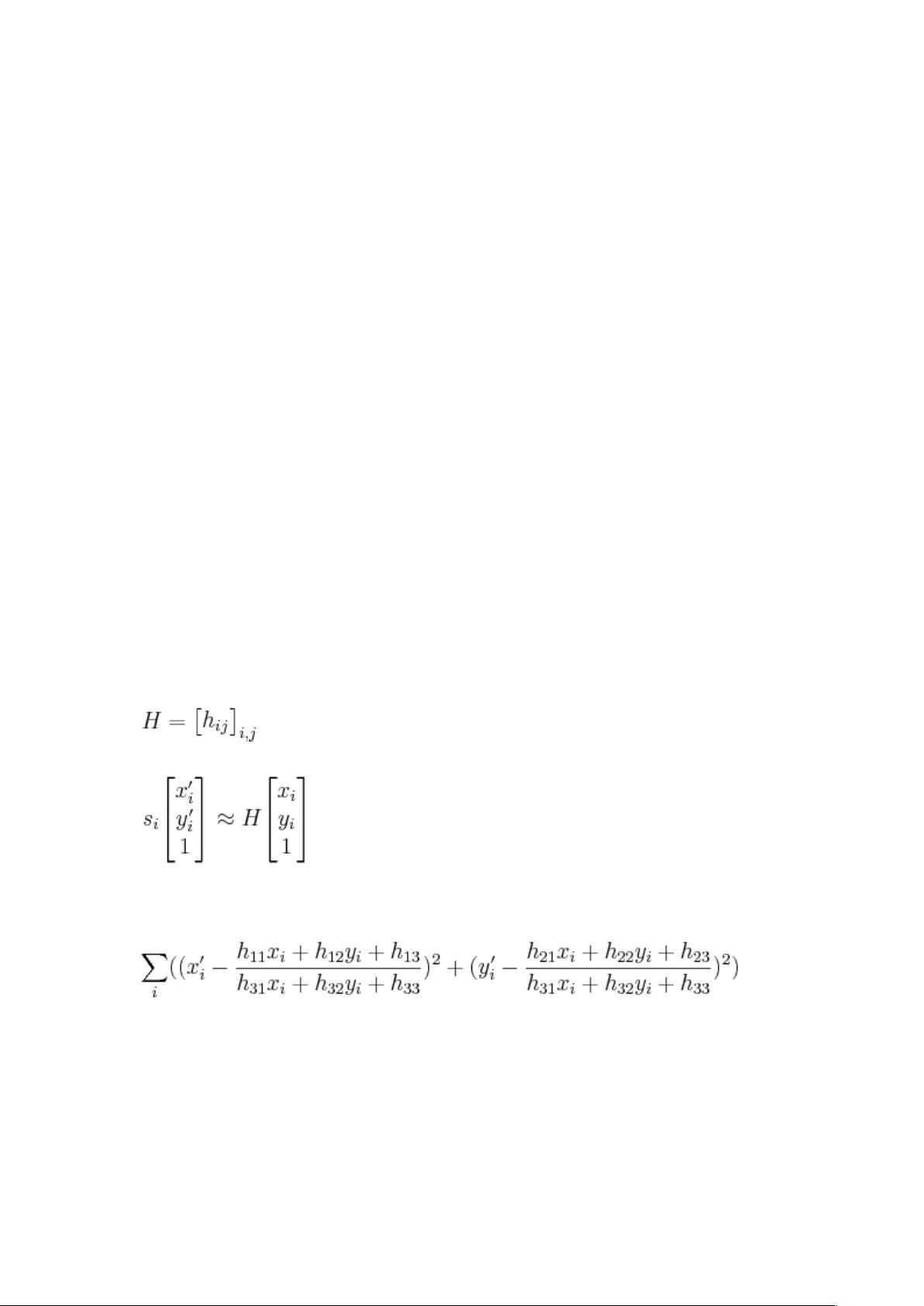
FindHomography
计算两个平面之间的透视变换
&'(;' (=&3&5*.>& ,!-./,*1&' ,
& ,!-./(,1&' ,
!-./>&3&5*.>9
,*1&' ,
原始平面的点坐标,大小为 6,6,#6 或者 6# 矩阵(后两个
表示齐次坐标),这儿 6 表示点的数目。
(,1&' ,
目标平面的点坐标大小为 6,6,#6 或者 6# 矩阵(后两个表
示齐次坐标)。
>&3&5*.>
输出的 ## 的 >&3&5*.> 矩阵。
函数 ;' (=&3&5*.> 计算源平面和目标平面之间的透视变换
?
使得反投影错误最小:
这个函数可以用来计算初始的内参数和外参数矩阵。由于 =&3&5*.> 矩阵
的尺度可变,所以它被规一化使得 h
##
剩余15页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2012-07-30 上传
2022-08-03 上传
2010-11-26 上传
2014-05-04 上传
点击了解资源详情
点击了解资源详情

hu18jialin277
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- JavaScript实现的高效pomodoro时钟教程
- CMake 3.25.3版本发布:程序员必备构建工具
- 直流无刷电机控制技术项目源码集合
- Ak Kamal电子安全客户端加载器-CRX插件介绍
- 揭露流氓软件:月息背后的秘密
- 京东自动抢购茅台脚本指南:如何设置eid与fp参数
- 动态格式化Matlab轴刻度标签 - ticklabelformat实用教程
- DSTUHack2021后端接口与Go语言实现解析
- CMake 3.25.2版本Linux软件包发布
- Node.js网络数据抓取技术深入解析
- QRSorteios-crx扩展:优化税务文件扫描流程
- 掌握JavaScript中的算法技巧
- Rails+React打造MF员工租房解决方案
- Utsanjan:自学成才的UI/UX设计师与技术博客作者
- CMake 3.25.2版本发布,支持Windows x86_64架构
- AR_RENTAL平台:HTML技术在增强现实领域的应用
