自动控制原理复习精要:传递函数与结构图简化
版权申诉
"超详细自动控制原理复习总结(精华版).pdf"
自动控制原理是电气工程、自动化、航空航天等多个领域中的核心课程,它涉及到系统稳定、性能分析和控制器设计等内容。本复习总结主要聚焦于自动控制系统的数学建模、等效变换和简化方法。
一、系统数学模型
自动控制系统有三种基本的数学模型:时域模型(微分方程)、复域模型(传递函数)和频域模型(频率特性)。传递函数是重点,它定义为在零初始条件下,系统输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。理解这一概念对于分析系统动态响应至关重要。
二、结构图的等效变换与简化
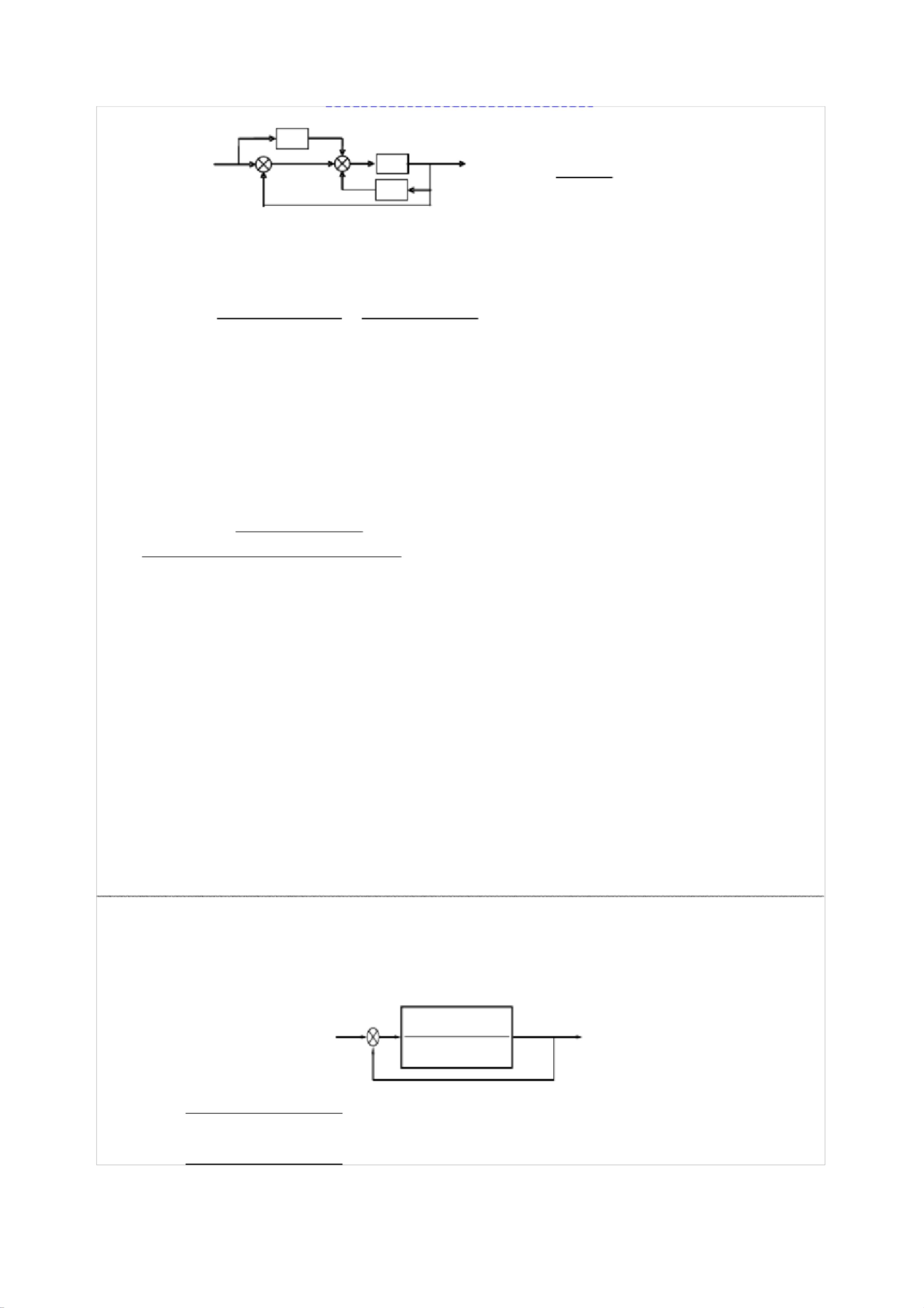
结构图等效变换的目标是消除中间变量,得到系统的总传递函数。等效变换应保持系统在输入与输出之间的关系不变。基本的连接方式包括串联、并联和反馈连接。处理复杂结构图时,可以运用移出引出点或比较点的方法。具体规则如下:
- 引出点前移:移动支路上乘以引出点处的传递函数。
- 引出点后移:移动支路上乘以1/引出点处的传递函数。
- 相加点前移:移动支路上乘以1/相加点处的传递函数。
- 相加点后移:移动支路上乘以相加点处的传递函数。
例如,在求解系统的传递函数C(s)/R(s)时,可以先通过等效变换和反馈消除法逐步简化结构图,最终得到系统的传递函数表达式。
三、应用实例
解法通常包括以下步骤:
1. 明确结构图中的串联、并联和反馈连接关系。
2. 移动引出点或相加点,按照上述规则进行等效变换。
3. 消除反馈连接,通常使用反馈因子表示反馈部分。
4. 逐步简化结构,直到得到系统总传递函数。
四、总结
自动控制原理的学习不仅要求理解基本概念,还需要掌握数学模型的转换和简化技巧。这有助于对系统的动态性能进行深入分析,从而设计出满足特定性能指标的控制器。在实际工程应用中,这些知识是实现自动化设备和系统稳定、高效运行的基础。
n n 1 1 0
R(s)
G
br
+
C(s)
G
k
+
-
E (s)
+
-
+
H
G( s)
s(s
;
H (s) s
6)
在
G
br
(
s
)
0
时,闭环系统响应阶跃输入时的超调量
p
4.6 %
,峰值时间
t
p
0.733
秒,确
定系统的 k 值和 值;
k
2
解:
(1)
(s)
s
2
(6
n
;
k )s k s
2
2 s
2
% 4.6 % 0.7
k
;就
n n
2
k 36
n
就
t
p
0.733
n
6
6 k 2
n
0.067
四,附加闭环负实零点对系统影响
具有闭环负实零点时的二阶系统分析对系统的作用表现为:
1. 仅在过渡过程开头阶段有较大影响;
2. ※附加合适的闭环负实零点可使系统响应速度加快,但系统的超调量略有增大;
3. ※负实零点越接近虚轴,作用越强 ;
五,高阶系统的时域分析 --- 利用闭环主导极点降阶
假如在系统全部的闭环极点中,距离虚轴最近的闭环极点四周没有闭环零点,而其他
闭环极点又远离虚轴,且满意
式中,
s
1
——为主导极点;
s
i
——为非主导极点;
| Re si | | 5 | Re s 1 |
就距离虚轴最近的闭环极点所对应的响应重量随着时间的推移衰减得最慢,从而在系统的
响应过程中起主导作用; 一般闭环主导极点为共轭闭环主导极点或者一个实闭环主导极点;
六,※※※ 利用劳斯判据判定系统稳固性并求使得系统稳固的参数条件;
1.※依据特点方程:
D(s) a s
n
a s
n 1
L a s a 0
,就线性系统稳固的充要条件是
劳斯表首列元素均大于零 ;首列系数符号转变次数与分布在 s 平面右半部的极点个数相同;
2.劳斯表特殊情形时,系统临界稳固或者不稳固;
3. 假如系统稳固,就特点方程
D (s)
a s
n
a s
n 1
L a s a
0
系数同号且不缺项;
4. ※利用劳斯判据判定系统稳固性
n n 1 1 0
例 4: 已知系统结构图,试用劳斯稳固判据确定使闭环系统稳固的 k 的取值范畴;
解:
(s)
s( s
2
k
s 1)(s 2)
R(s)
-
整理,
k
s(s
2
k
s 1)s( 2)
C(s)
(s)
s
4
3s
3
k
3s
2
2s k
从高到低排列特点方程系数
剩余24页未读,继续阅读
2019-09-02 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

a1336360
- 粉丝: 1
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Struts2+pring+Hibernate+ExtJS开发实例(PDF)
- C++ standard
- 系统\Windows XP系统自带工具应用详解
- TOAD快速入门.pdf
- 电子技术基础 基础电路
- CAN控制器SJA1000的控制模块BCAN
- SJA1000应用指南
- 本科毕业论文-学生宿舍管理设计与实现
- Apress.Foundations.of.WF.An.Introduction.to.Windows.Workflow.Foundation.Oct.2006
- 搭建Eclipse+Myeclipse开发环境
- Microsoft.Press.Windows.Workflow.Foundation.Step.By.Step.Mar.2007.ebook-LiB
- .net 环境下ocx控件制作演示
- 网页超长文章自动分页
- Workflow Modeling—Tools for Process Improvement and Application Development
- 高质量C++编程指南
- Java毕业设计文献翻译
