

步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩
选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。单一的惯
性负载和单一的摩擦负载是不存在的。直接起动时(一般由低速)时二种负载均要
考虑,加速起动时主要考虑惯性负载,恒速运行进只要考虑摩擦负载。一般情况下,
静力矩应为摩擦负载的 2-3 倍内好,静力矩一旦选定,电机的机座及长度便能确定
下来(几何尺寸)。
3、电流的选择
静力矩一样的电机,由于电流参数不同,其运行特性差别很大,可依据矩频特
性曲线图,判断电机的电流(参考驱动电源、及驱动电压)。
2.2 步进电机驱动系统介绍
步进电机不能直接接到交直流电源上工作,而必须使用专用设备——步进电机
驱动器.步进电机驱动系统的性能,除与电机本身的性能有关外,也在很大程度上
取决于驱动器的优劣。典型的步进电机驱动系统是由步进电机控制器、步进电机驱
动器和步进电机本体三部分组成。步进电机控制器发出步进脉冲和方向信号,每发
一个脉冲,步进电机驱动器驱动步进电机转子旋转一个步距角,即步进一步。步进
电机转速的高低、升速或降速、启动或停止都完全取决于脉冲的有无或频率的高低。
控制器的方向信号决定步进电机的顺时针或逆时针旋转。通常,步进电机驱动器由
逻辑控制电路、功率驱动电路、保护电路和电源组成。步进电机驱动器一旦接收到
来自控制器的方向信号和步进脉冲,控制电路就按预先设定的电机通电方式产生步
进电机各相励磁绕组导通或截止信号。控制电路输出的信号功率很低,不能提供步
进电机所需的输出功率,必须进行功率放大,这就是步进电机驱动器的功率驱动部
分。功率驱动电路向步进电机控制绕组输入电流,使其励磁形成空间旋转磁场,驱
动转子运动。保护电路在出现短路、过载、过热等故障时迅速停止驱动器和电机的
运行。
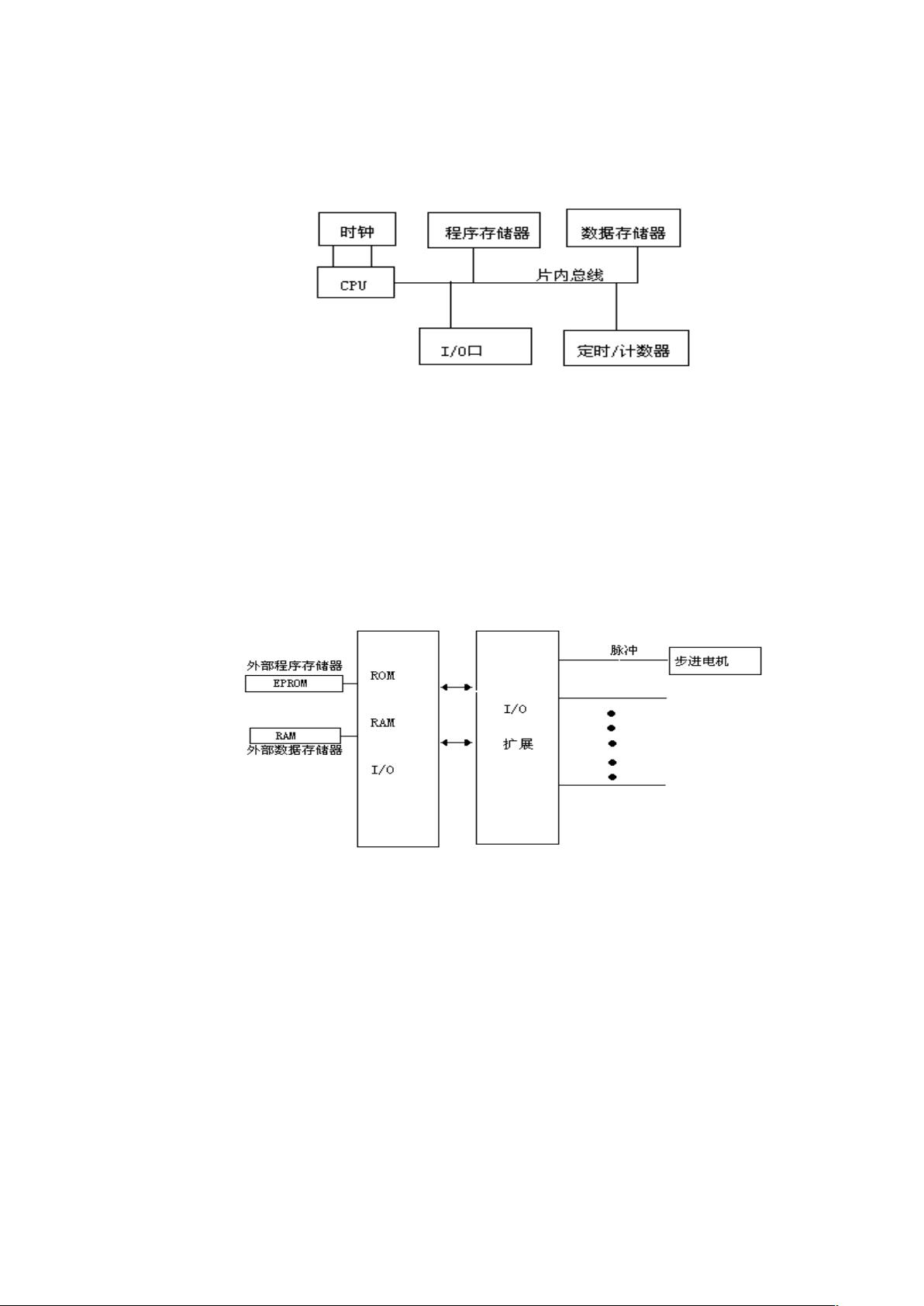
2.3 单片机原理
2.3.1 单片机原理概述
单片机(single-chip microcomputer)是把微型计算机主要部分都集成在一
块芯片上的单芯片微型计算机。图 2.3.1.1 中表示单片机的典型结构图。由于单片
机的高度集成化,缩短了系统内的信号传送距离,优化了结构配置,大大地提高了
剩余32页未读,继续阅读

老帽爬新坡
- 粉丝: 85
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助







