三菱Q-MOTION运动CPU基础设定教程
需积分: 10 130 浏览量
更新于2024-07-24
收藏 802KB PDF 举报
"这篇文档详细介绍了如何设置三菱的Q-MOTION CPU进行基本的寸动操作,特别适合初学者。文章内容涵盖了硬件安装、配置、以及MOTION CPU的多个软件设置,包括系统设置、伺服驱动器站号设定、CPU组合与数据握手区域的配置等关键步骤。"
在三菱的Q-MOTION CPU设置过程中,首先要进行硬件架设,确保正确配线,并在伺服驱动器上设定站号。站号0代表第一站,1代表第二站,以此类推。这一步至关重要,因为正确的站号设定能够使系统识别并控制对应的伺服电机。
接着进入MOTION的配置阶段,首先新建一个文件,选择相应的MOTION型号,然后通过系统设置来设定CPU的类型和所能控制的伺服电机数量。Q172能控制最多8个伺服马达,而Q173则能控制32个。在系统设置中,需要设定主板架构,包括MAINBASE(当前使用的基板)和EXTENSIONBASE(可扩展的基板),以便于扩展和管理。
在Q-MOTION的多重CPU架构中,至少需要2个CPU,最多4个,其中主程序CPU的等级必须在Q02CPU及以上。Q00J、Q00、Q01CPU不支持与运动CPU配合使用。每个CPU间的通信需要通过数据握手来实现,可以设置最多4个数据交握区,以确保信息的准确传递。
在数据握手设置中,"Refreshsetting"用于定义数据交握的类型,"Dev.starting"则用来设定数据交握的起始位置。例如,如果在第二个CPU中设定72点,起始位置为M3072到M4223,那么当第一个CPU驱动M3072时,其他CPU的相应位置也会被驱动。为了简化设置,通常会利用Q-MOTION特有的M和D区域作为数据交握的设定区。
在MOTION控制器侧的设置完成后,还需要使用GPPW(Graphic Programming Package for PLCs)进一步配置,以确保所有设备能够协同工作。这一部分未在提供的内容中详述,但在实际操作中,GPPW会用来编写和调试PLC程序,确保指令正确地发送到各个CPU。
这个教程为初学者提供了一条清晰的路径,帮助他们理解和设置三菱Q-MOTION运动CPU,涵盖了从硬件连接到软件配置的各个方面,对实际应用具有很高的参考价值。
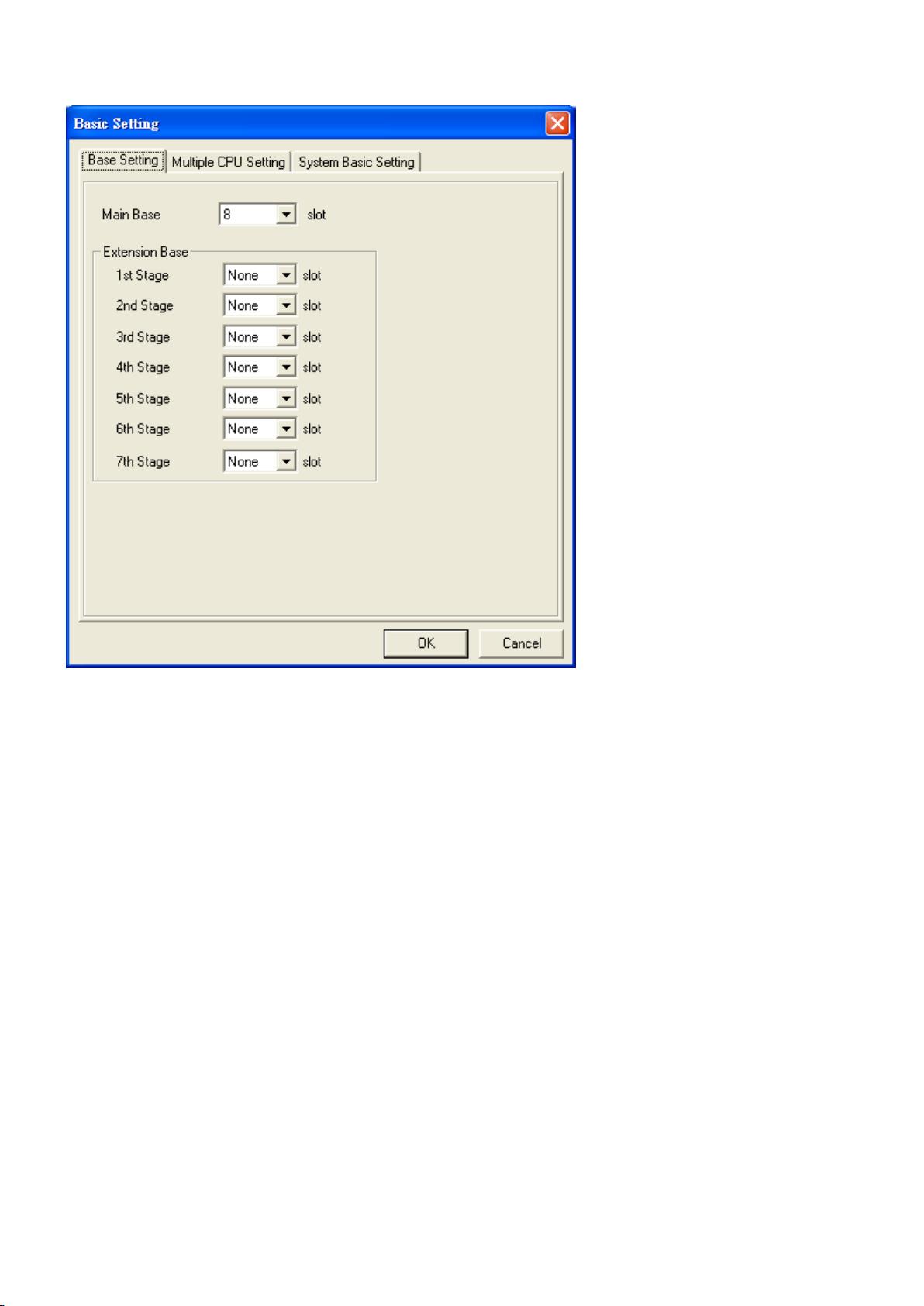
一開始要先設定基板的架構,按下上方(OPTION)(BASIC SETTING)的選項,會出現下列視窗:
MAIN BASE—就是你目前架設 MOTION 的基板,看你現在用的是幾槽,就設幾槽。
EXTENSION BASE—可擴充的基板,最多可擴充 7 個。每擴充一個,就要設定所擴充基板的 SLOT。
剩余19页未读,继续阅读
2023-05-14 上传
2024-03-14 上传
2023-07-14 上传
2023-03-28 上传
2023-03-28 上传
2023-05-13 上传
2023-11-01 上传

meyspa
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- JSP+SSM科研管理系统响应式网站设计案例
- 推荐一款超级好用的嵌入式串口调试工具
- PHP域名多维查询平台:高效精准的域名搜索工具
- Citypersons目标检测数据集:Yolo格式下载指南
- 掌握MySQL面试必备:程序员面试题解析集锦
- C++软件开发培训:核心技术资料深度解读
- SmartSoftHelp二维码工具:生成与解析条形码
- Android Spinner控件自定义字体大小的方法
- Ubuntu Server on Orangepi3 LTS 官方镜像发布
- CP2102 USB驱动程序的安装与更新指南
- ST-link固件升级指南:轻松更新程序步骤
- Java实现的质量管理系统Demo功能分析与操作
- Everything高效文件搜索工具:快速精确定位文件
- 基于B/S架构的酒店预订系统开发实践
- RF_Setting(E22-E90(SL)) V1.0中性版功能解析
- 高效转换M3U8到MP4:免费下载工具发布
