机器人操作指南:电源关闭与控制面板详解
需积分: 9 53 浏览量
更新于2024-07-05
收藏 3.02MB PDF 举报
"机器人中文(2-2).pdf"
该文档主要介绍了机器人操作系统中的关键操作步骤和设备组件,包括电源关闭过程、操作盘和示教单元的功能。
1. 电源关闭步骤:
- 确认机器人停止:在机器人运行时按下操作盘或示教单元的停止键来停止机器人运动。
- 关闭程序文件:如果正在编辑或示教状态,需按下示教单元的F4键关闭程序,否则未保存的程序会丢失。
- 关闭伺服电源:通过操作盘上的“伺服OFF”按钮断开伺服电机电源。
- 关闭控制电源:操作示教单元或操作盘上的电源开关。
2. 操作盘功能:
- START按钮:启动程序并进行连续运行。
- STOP按钮:停止机器人但保持伺服电源接通。
- RESET按钮:消除当前错误,也可重置中间停止的程序使其从头开始。
- END按钮:执行程序的END命令,停止程序运行,适用于一次循环后停止机器人动作。
- UP/DOWN按钮:用于选择程序编号和调整速度。
- SVOON/SVOOFF开关:分别用于打开和关闭伺服电机电源。
- EMG.STOP(紧急停止)开关:立即停止机器人,也可切断伺服电源。
- MODE切换开关:选择不同操作模式,如示教、远程控制等。
- CHANGING DISPLAY:切换显示菜单,如程序编号、行编号、速度等。
- STATUSNUMBER显示:显示当前状态,如程序号、错误号、行号和速度。
- TB连接器:连接示教单元。
- RS232C连接器:连接控制器和个人计算机。
- USB接口和电池:提供与个人计算机的连接和系统备份电池。
3. 示例教单元:
- 示教单元包含多个按键和功能,如ENAB/.DISABLE键,用于启用或禁用示教单元。
- 其他按键包括数字输入、功能键、方向键等,用于程序编写、编辑和调试。
- T/B背面可能有额外的连接器和接口,如示教单元的背部连接器。
这份文档详细阐述了机器人操作的基本流程和安全注意事项,对于理解和操作机器人系统至关重要,特别是对于初学者和维护人员来说,了解这些基础知识能确保安全有效地进行机器人操作和编程。
-17-
第 2 章 示教单元
本章介绍示教单元的各个功能。
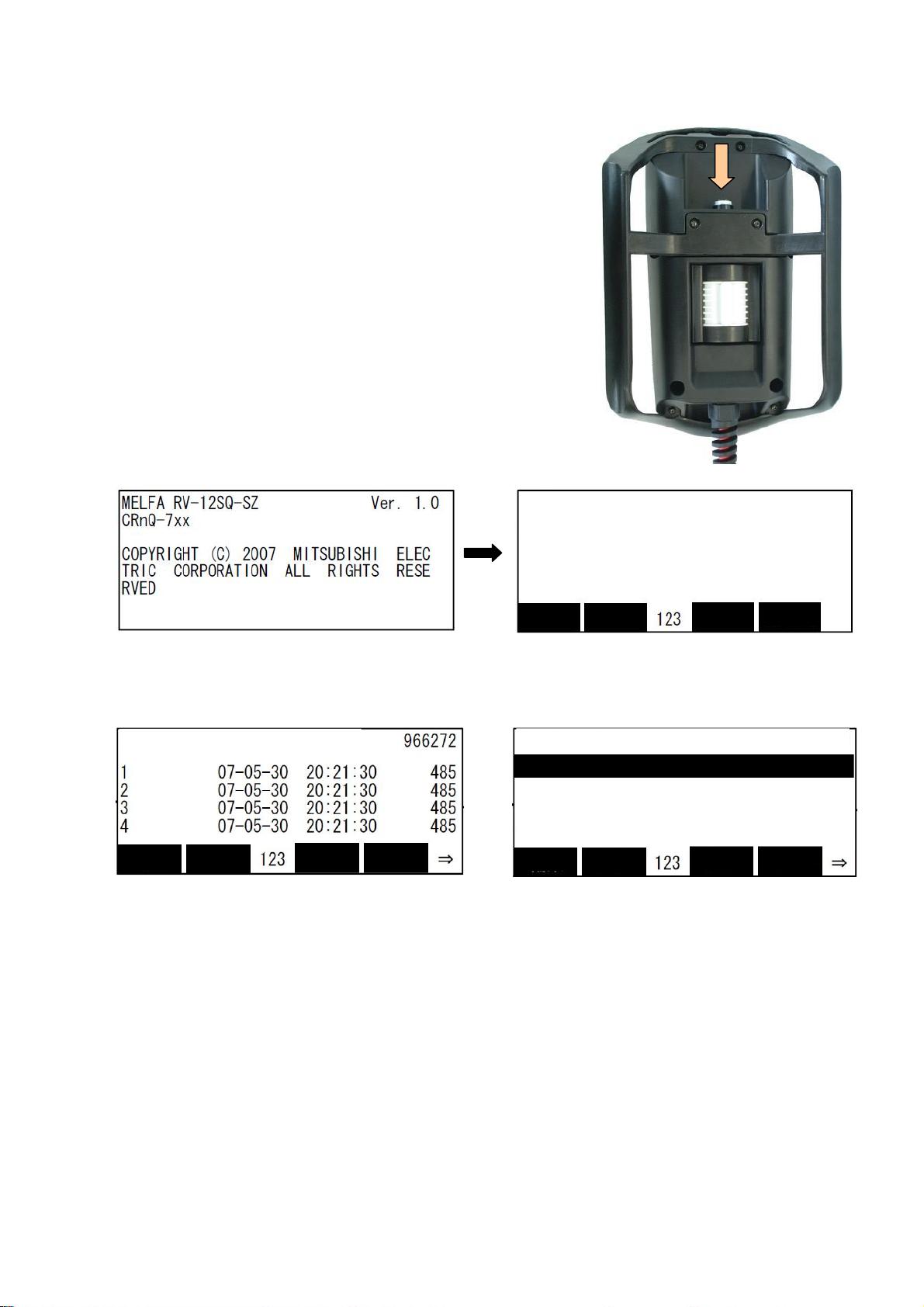
1. 显示菜单
将示教单元的有效/无效(ENABLE/DISABLE)开关置于有效。
按压某个键(例如 EXE 键)。
显示菜单画面。
菜单有以下 5 种类型:
1. 管理·编辑
2. 运行
3. 参数
4. 原点·制动
5. 设置·初始化
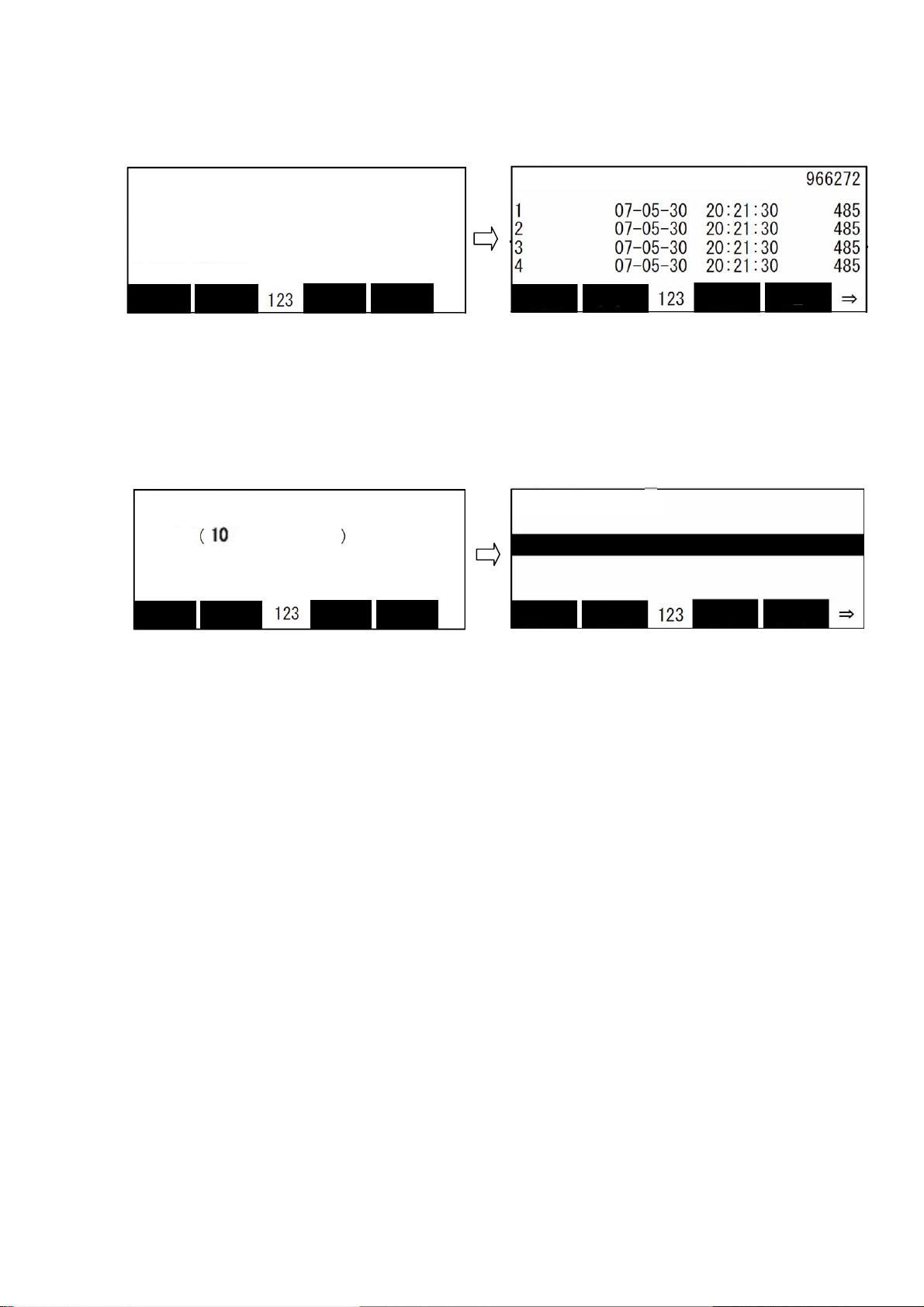
2. 管理·编辑画面
管理·编辑功能用于进行程序的新建及编辑、抓手的位置示教、程序管理等多个目的。
<菜单>
1.管理·编辑 2.运行
3.参数 4.原点·制动
5.设置·
初始化
关闭
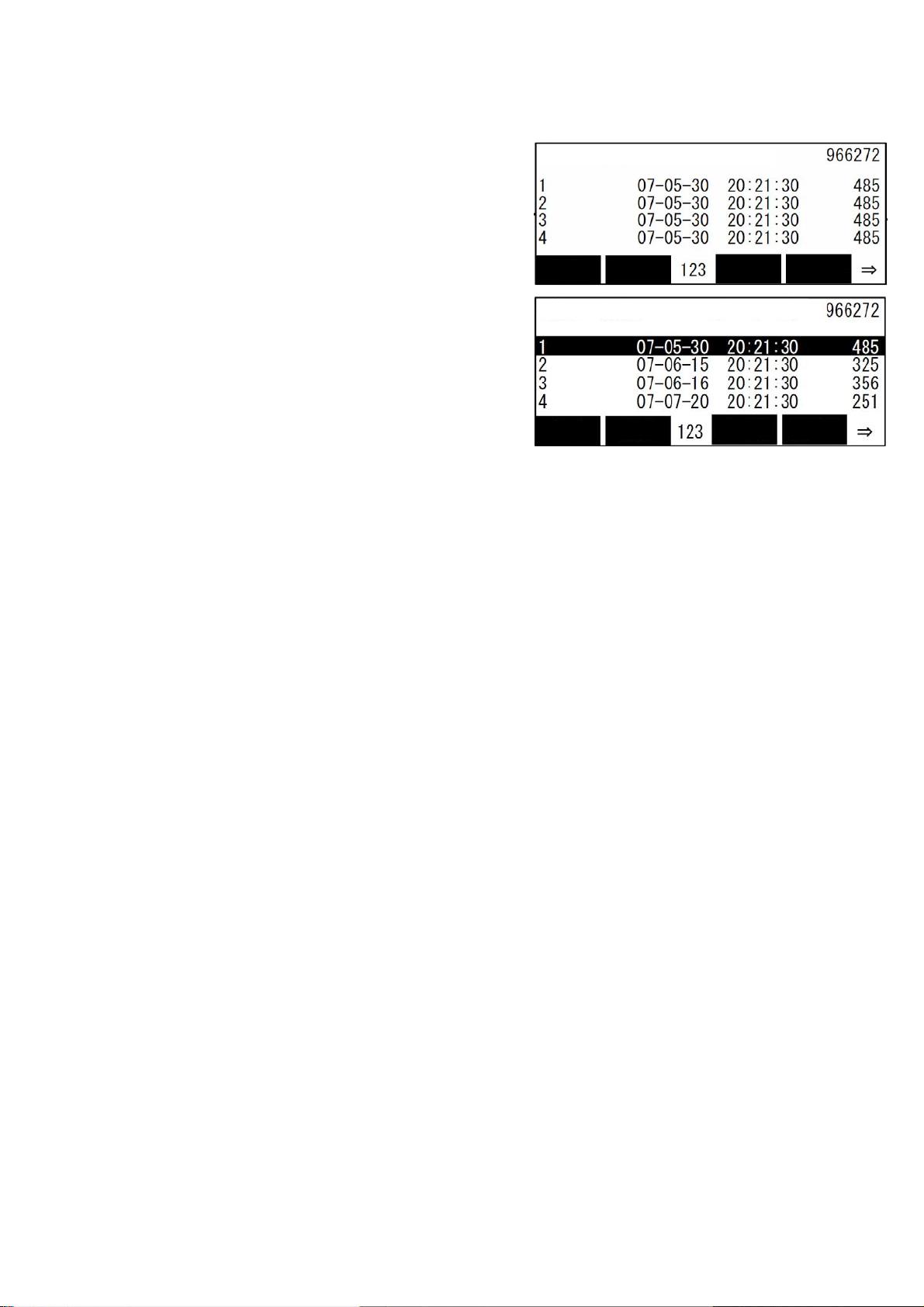
<管理·编辑〉 1/ 剩余6
编辑 位置 新建 复制
<程序> 1
编辑 删除 插入 示教
1 Mov P1
2 Mov P2
3 Mov P3
4 Mov P4
剩余69页未读,继续阅读
2023-09-05 上传
2023-08-06 上传
2024-02-05 上传
2023-06-20 上传
2023-06-15 上传
2023-06-15 上传

七恒自动化丁工
- 粉丝: 12
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
