
4
大多数工业对象都不同程度地存在非线性、时变、干扰等特性,随着环境变化对
象的参数甚至是结构都会发生变化。自 Ziegler 和 Nichols 提出 PID 参数经验公
式法起,有很多方法已经用于 PID 控制器的参数整定。这些方法按照发展阶段,
可分为常规 PID 控制器参数整定方法和智能 PID 控制器参数整定方法。按照 PID
的控制方式又分为模拟 PID 控制算法和数字 PID 控制算法。
2. 1 模拟 PID 控制算法
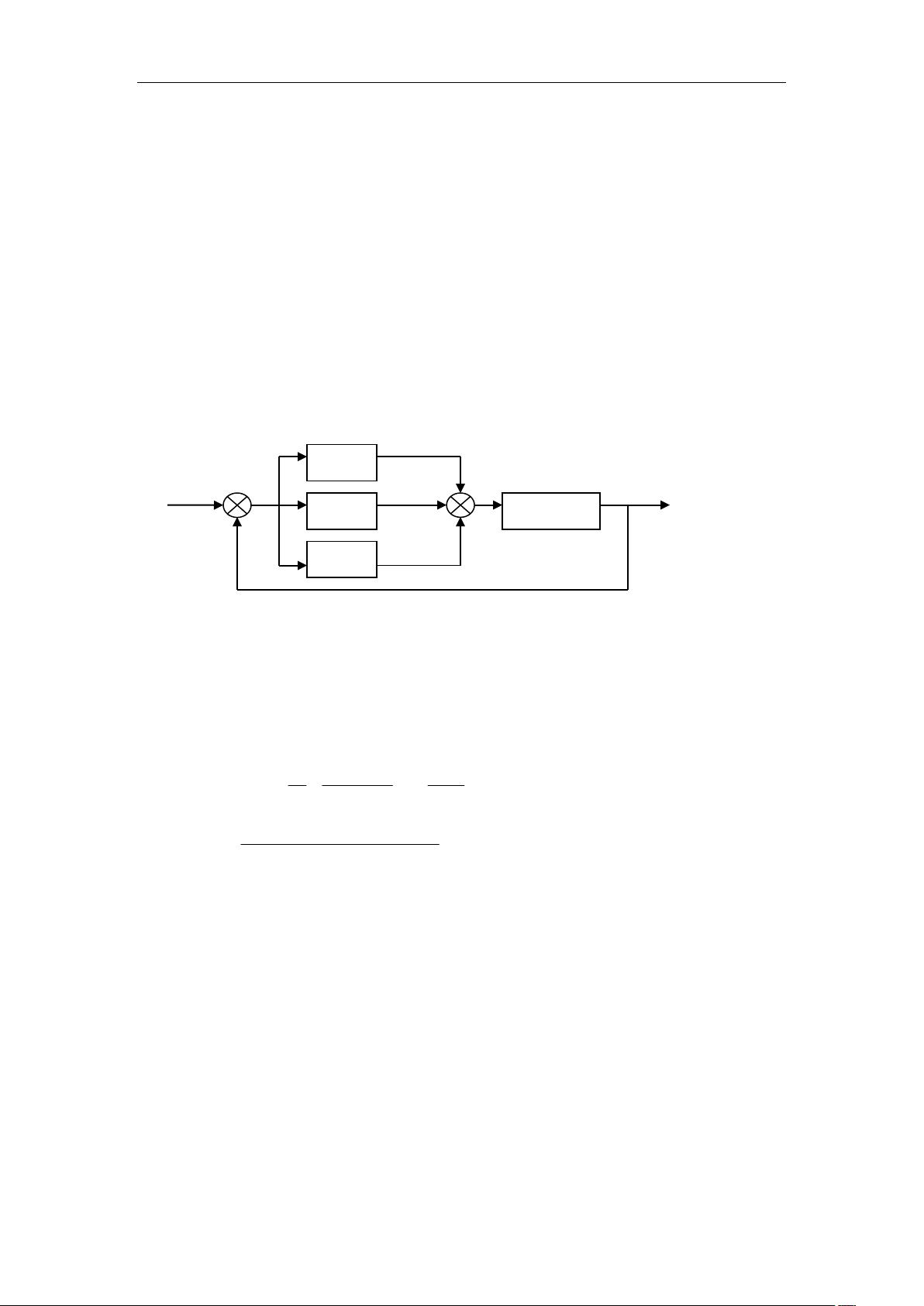
模拟 PID 控制系统结构如图 2-1 所示。
它主要由 PID 控制器和被控对象所组成。而 PID 控制器则由比例、积分、
微分三个环节组成。它的数学描述为:
( )
p D
1
e(t)dt
1 de(t)
u(t)=K [e(t)+ + +T ]
T ! ! dtr n r-
ò
(2-1)
P
s+56780
G (s)=
s3 +87.65s2 +1234s+123
(2-2)
式中,K
p
为比例系数 T
I
;为积分时间常数;T
D
为微分时间常数.
PID 控制器各校正环节的主要控制作用如下:
(l)比例环节及时成比例地反映控制系统的偏差信号 e(t),偏差一旦产生,控
制器立即产生控制作用,以减少偏差。比例系数 k
P
的作用在于加快系统的响应
速度,提高系统调节精度。k
P
越大,系统的响应速度越快,系统的调节精度越
高,也就是对偏差的分辨率(重视程度)越高,但将产生超调,甚至导致系统不稳
定。k
P
取值过小,则会降低调节精度,尤其是使响应速度缓慢,从而延长调节
时间,使系统静态、动态特性变坏。
+
-
+
+
+
c(t)
u(t)
e(t)
r(t)
比例
积分
微分
被控对象
图 2-1 模拟 PID 控制系统结构
图
剩余33页未读,继续阅读















