

2
并把有关信息作为知识存入计算机知识库中,然后计算机根据控制系统的实际响
应情况,运用模糊推理,便可实现对 PID 的参数最佳调整。
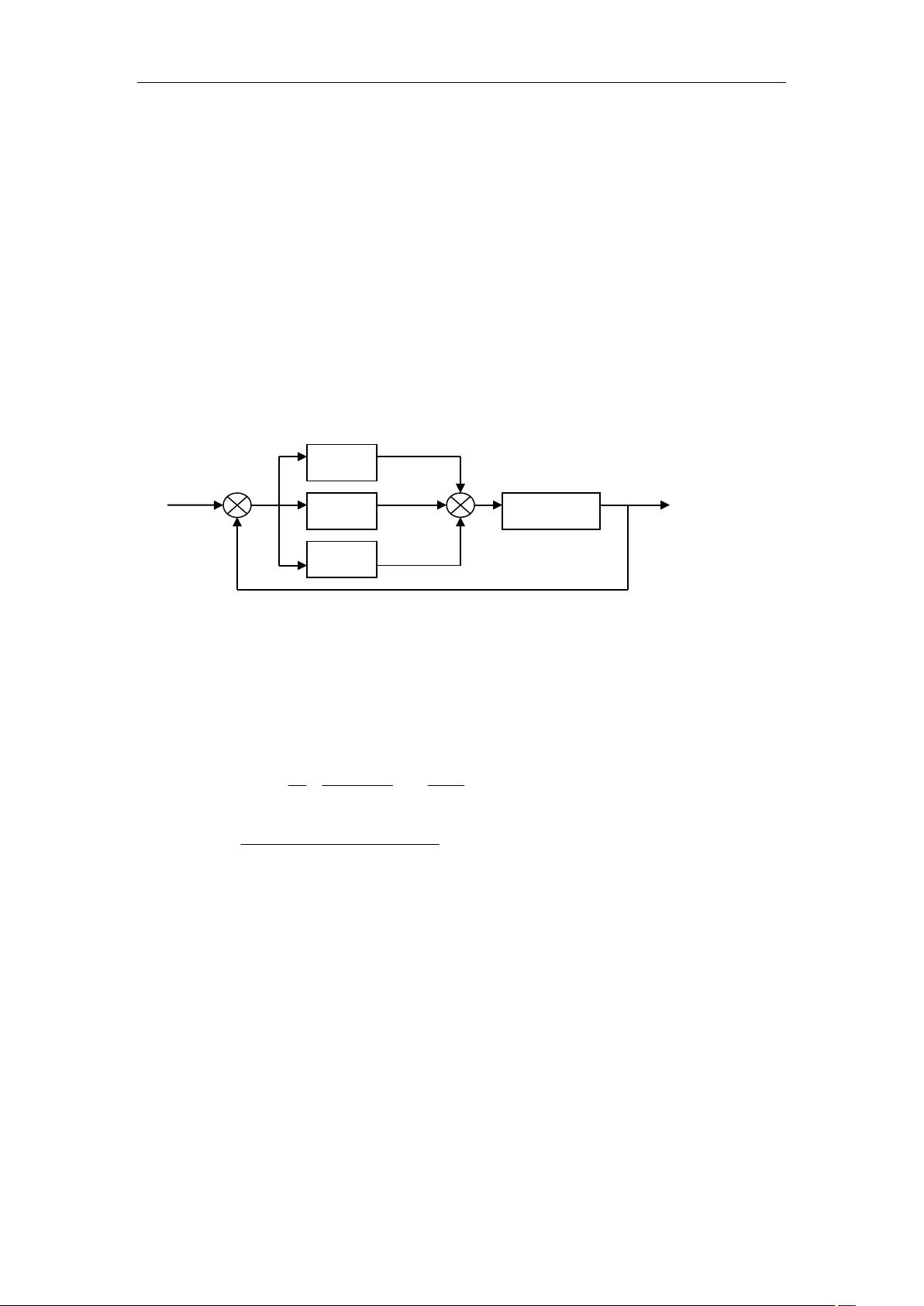
2 PID 控制算法
PID 控制器是一种基于偏差在“过去、现在和将来”信息估计的有效而简
单的控制算法。而采用 PID 控制器的控制系统其控制品质的优劣在很大程度上
取决于 PID 控制器参数的整定。PID 控制器参数整定,是指在控制器规律己经
确定为 PID 形式的情况下,通过调整 PID 控制器的参数,使得由被控对象、控
制器等组成的控制回路的动态特性满足期望的指标要求,达到理想的控制目标
[6]
。
对于 PID 这样简单的控制器,能够适用于广泛的工业与民用对象,并仍以很
高的性价比在市场中占据着重要地位,充分地反映了 PID 控制器的良好品质。
概括地讲,PID 控制的优点主要体现在以下两个方面: 原理简单、结构简明、实
现方便,是一种能够满足大多数实际需要的基本控制器; 控制器适用于多种截然
不同的对象,算法在结构上具有较强的鲁棒性,确切地说,在很多情况下其控制
品质对被控对象的结构或参数摄动不敏感。
但从另一方面来讲,控制算法的普及性也反映了 PID 控制器在控制品质上
的局限性。具体分析,其局限性主要来自以下几个方面:算法结构的简单性决定
了 PID 控制比较适用于单输入单输出最小相位系统,在处理大时滞、开环不稳
定过程等受控对象时,需要通过多个 PID 控制器或与其他控制器的组合,才能
得到较好的控制效果;算法结构的简单性同时决定了 PID 控制只能确定闭环系
统的少数主要零极点,闭环特性从根本上只是基于动态特性的低阶近似假定的;
出于同样的原因,决定了单一 PID 控制器无法同时满足对假定设定值控制和伺
服跟踪控制的不同性能要求。
如何更好地整定 PID 控制器的参数一直是 PID 控制器设计的主要课题。从
实际需要出发,一种好的 PID 控制器参数整定方法,不仅可以减少操作人员的
负担,还可以使系统处于最佳运行状态。传统的 PID 控制算法或是依赖于对象
模型,或是易于陷入局部极小,因此存在一定的应用局限性,且难以实现高性能
的整定效果,常常超调较大、调整时间较长、误差指标过大等。常规的控制系统
主要针对有确切模型的线性过程,其 PID 参数一经确定就无法调整,而实际上
剩余30页未读,继续阅读















