
PREPRINT 8
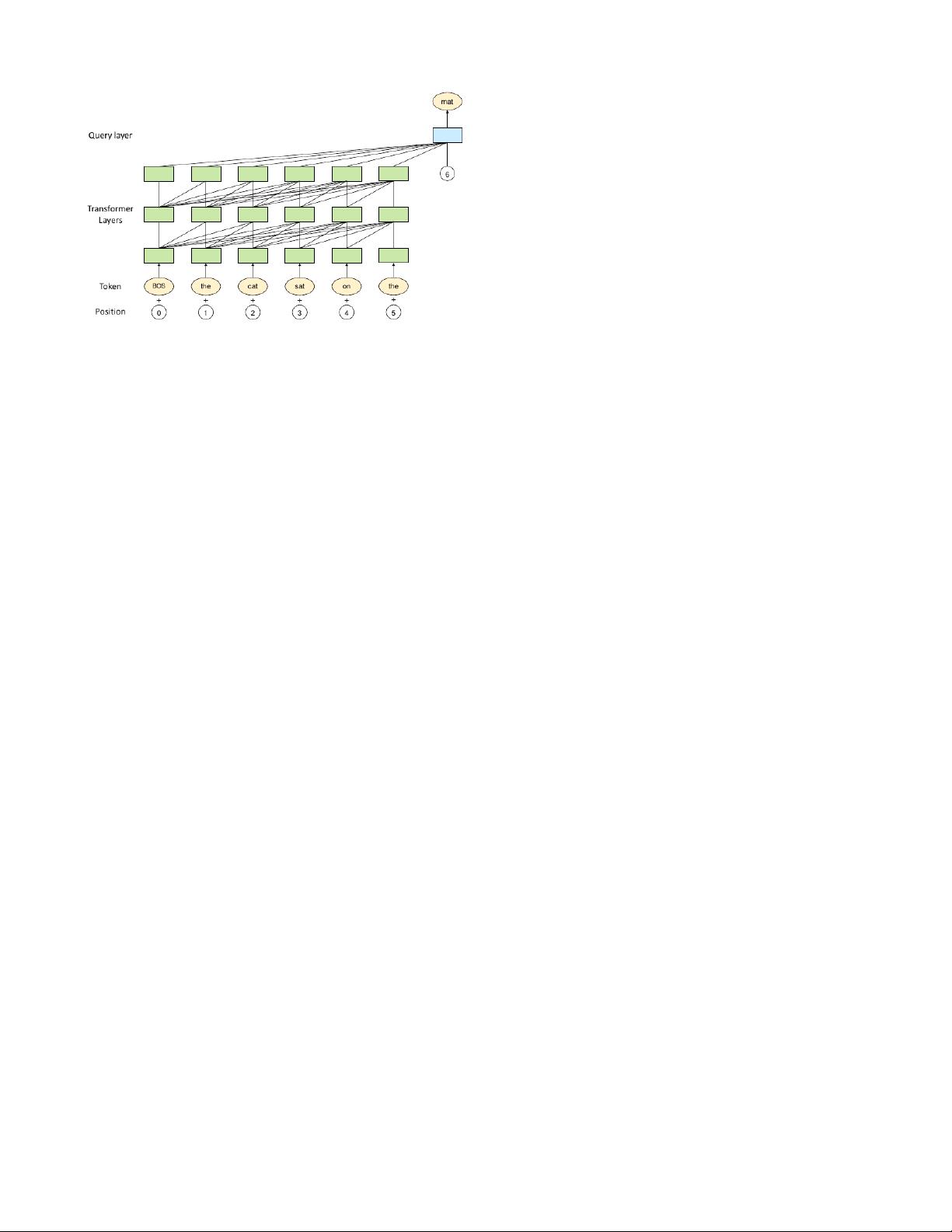
Fig. 8: The image is the article of [103], showing an example
of PanGu-α architecture.
1.5 CPM-2 [12]: Cost-efficient Pre-trained language
Models (CPM-2) pre-trains bilingual (English and Chinese)
11B and 198B mixture-of-experts (MoE) models on the Wu-
DaoCorpus [104] dataset. The tokenization process removes
“_” white space tokens in the sentencepiece tokenizer. The
models are trained with knowledge inheritance, starting with
only the Chinese language in the first stage and then adding
English and Chinese data. This trained model gets duplicated
multiple times to initialize the 198B MoE model. Moreover,
to use the model for downstream tasks, CPM-2 experimented
with both complete fine-tuning and prompt fine-tuning as
in [40] where only prompt-related parameters are updated
by inserting prompts at various positions, front, middle, and
back. CPM-2 also proposes INFMOE, a memory-efficient
framework with a strategy to dynamically offload parameters
to the CPU for inference at a 100B scale. It overlaps data
movement with inference computation for lower inference
time.
1.6 ERNIE 3.0 [105]: ERNIE 3.0 takes inspiration from
multi-task learning to build a modular architecture using
Transformer-XL [106] as the backbone. The universal repre-
sentation module is shared by all the tasks, which serve as the
basic block for task-specific representation modules, which are
all trained jointly for natural language understanding, natural
language generation, and knowledge extraction. This LLM is
primarily focused on the Chinese language, claims to train
on the largest Chinese text corpora for LLM training, and
achieved state-of-the-art in 54 Chinese NLP tasks.
1.7 Jurassic-1 [107]: A pair of auto-regressive language
models, including a 7B-parameter J1-Large model and a
178B-parameter J1-Jumbo model. The training vocabulary of
Jurassic-1 comprise word pieces, complete words, and multi-
word expressions without any word boundaries, where possible
out-of-vocabulary instances are interpreted as Unicode bytes.
Compared to the GPT-3 counterparts, the Jurassic-1 models
apply a more balanced depth-to-width self-attention architec-
ture [108] and an improved tokenizer for a faster prediction
based on broader resources, achieving a comparable perfor-
mance in zero-shot learning tasks and a superior performance
in few-shot learning tasks given the ability to feed more
examples as a prompt.
1.8 HyperCLOVA [109]: A Korean language model with
GPT-3 architecture.
1.9 Yuan 1.0 [110]: Trained on a Chinese corpus with
5TB of high-quality text collected from the Internet. A
Massive Data Filtering System (MDFS) built on Spark is
developed to process the raw data via coarse and fine filtering
techniques. To speed up the training of Yuan 1.0 with the
aim of saving energy expenses and carbon emissions, various
factors that improve the performance of distributed training
are incorporated in architecture and training like increasing
the number of hidden size improves pipeline and tensor par-
allelism performance, larger micro batches improve pipeline
parallelism performance, and higher global batch size improve
data parallelism performance. In practice, the Yuan 1.0 model
performs well on text classification, Winograd Schema, natural
language inference, and reading comprehension tasks.
1.10 Gopher [111]: The Gopher family of models ranges
from 44M to 280B parameters in size to study the effect of
scale on the LLMs performance. The 280B model beats GPT-
3 [6], Jurrasic-1 [107], MT-NLG [112], and others on 81% of
the evaluated tasks.
1.11 ERNIE 3.0 TITAN [35]: ERNIE 3.0 Titan extends
ERNIE 3.0 by training a larger model with 26x the number of
parameters of the latter. This bigger model outperformed other
state-of-the-art models in 68 NLP tasks. LLMs produce text
with incorrect facts. In order to have control of the generated
text with factual consistency, ERNIE 3.0 Titan adds another
task, Credible and Controllable Generations, to its multi-
task learning setup. It introduces additional self-supervised
adversarial and controllable language modeling losses to the
pre-training step, which enables ERNIE 3.0 Titan to beat
other LLMs in their manually selected Factual QA task set
evaluations.
1.12 GPT-NeoX-20B [113]: An auto-regressive model
that largely follows GPT-3 with a few deviations in architec-
ture design, trained on the Pile dataset without any data dedu-
plication. GPT-NeoX has parallel attention and feed-forward
layers in a transformer block, given in Eq. 4, that increases
throughput by 15%. It uses rotary positional embedding [66],
applying it to only 25% of embedding vector dimension as
in [114]. This reduces the computation without performance
degradation. Opposite to GPT-3, which uses dense and sparse
layers, GPT-NeoX-20B uses only dense layers. The hyperpa-
rameter tuning at this scale is difficult; therefore, the model
chooses hyperparameters from the method [6] and interpolates
values between 13B and 175B models for the 20B model. The
model training is distributed among GPUs using both tensor
and pipeline parallelism.
x + Attn(LN
1
(x)) + F F (LN
2
(x)) (4)
1.13 OPT [14]: It is a clone of GPT-3, developed with
the intention to open-source a model that replicates GPT-3
performance. Training of OPT employs dynamic loss scaling
[115] and restarts from an earlier checkpoint with a lower
learning rate whenever loss divergence is observed. Overall,
the performance of OPT-175B models is comparable to the
GPT3-175B model.
剩余42页未读,继续阅读

百态老人
- 粉丝: 5099
- 资源: 2万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


