胶囊机器人小肠内摩擦分析模型:理论与实验验证
147 浏览量
更新于2024-08-31
收藏 1.66MB PDF 举报
本文主要探讨了胶囊机器人在小肠中的分析摩擦模型。胶囊机器人在临床应用中受限的一个关键因素是缺乏其运动时的机械模型,特别是在恒速运动状态下,这是其主要的工作条件。论文研究者针对这一问题,提出了一种基于胶囊机器人尺寸、小肠材料的超弹性和两者相互作用特性的分析摩擦模型。
首先,研究者考虑了胶囊机器人的几何尺寸,这包括其形状、表面粗糙度等因素,这些都是影响与小肠内壁摩擦的重要参数。胶囊机器人与小肠内壁之间的摩擦不仅涉及到硬-硬接触,还涉及到软组织的弹性行为,因此引入了超弹性材料模型来模拟小肠壁的力学特性。这种模型通常采用幂律或Mooney-Rivlin等表达式,能够捕捉到材料在受力时的非线性响应。
接着,通过结合几何尺寸分析和材料性质的模拟,构建了一个时间依赖的摩擦阻力解析表达式。这个表达式考虑了速度变化对摩擦力的影响,以及摩擦系数随接触压力和速度的变化规律。通过对模型进行求解,研究人员得以预测胶囊机器人在小肠内的运动摩擦情况,并得到了与实际运动状态相关的摩擦力曲线。
通过将模型中的参数与实验数据进行对比,作者发现该分析模型具有较高的精度。计算得到的时间周期误差为6.88%,谷值误差为9.38%,峰值误差为4.78%。这些结果表明,该模型在一定程度上准确地反映了胶囊机器人与小肠之间的摩擦行为,为优化设计提供了有价值的理论依据。
然而,尽管模型的准确性得到了验证,文章也指出还有进一步改进的空间。研究者希望通过对现有摩擦模型的不断优化和完善,能够更好地理解胶囊机器人在小肠内的运动特性,这对于提升胶囊机器人在医疗领域的应用性能至关重要。未来的研究可能包括考虑更复杂的生物润滑效应,或者针对个体差异对摩擦模型进行个性化调整,以实现更精准的运动控制和更长的使用寿命。
这篇论文提供了一个基础的但实用的工具,为胶囊机器人在小肠内的运动摩擦控制提供了理论支持,对于推动胶囊机器人技术在临床实践中的应用具有重要意义。
where
I
1
¼
3k
4
1
þ 1
4k
2
1
; I
2
¼
k
4
2
þ 3
4k
2
2
ð3Þ
k
1
and k
2
are the principal stretches in the longitudinal and
circumferential directions, respectively. c
1
is a constant
material parameter. k
1Coll
, k
2Coll
are two material parame-
ters describing the stiffening properties of the collagen
network. (k
1LM
, k
2LM
) and (k
1CM
, k
2CM
) are the material
parameters accounting for the exponential increase in stress
with stretch ratio due to the longitudinal and circular
muscle layers, respectively. Equations (1) and (2) are
expressed as
r
l
¼ H
l
k
1
ðÞ
r
c
¼ H
c
k
2
ðÞ
ð4Þ
for simplification.
2.3 Interaction Model Between CR and Intestine
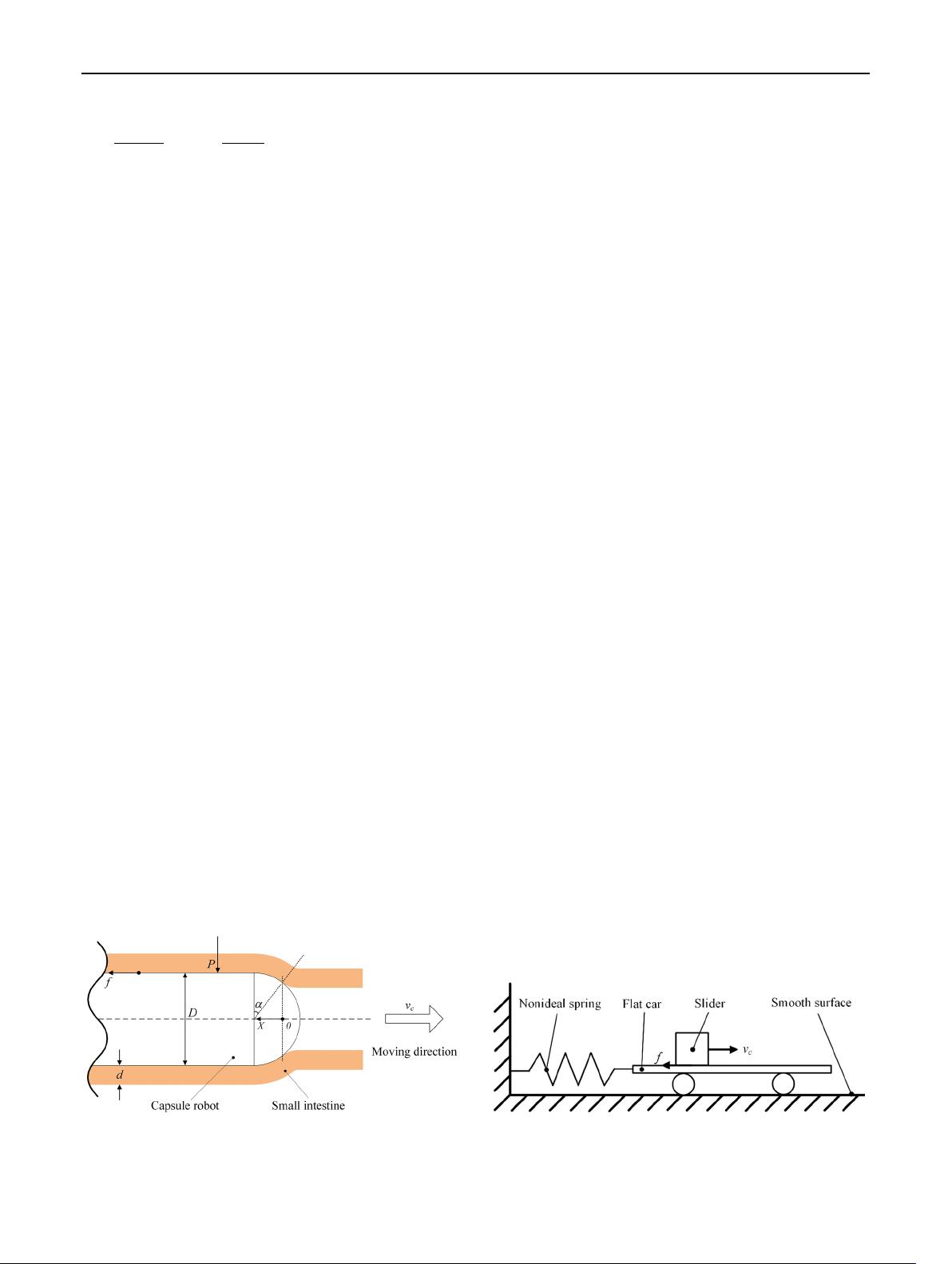
The interaction model, which contains the geometric model
and the mechanical model, has a significant influence on
the accuracy of the analytical friction model. It is required
not only to approach to reality, but also to be simple
enough for the analytic calculation. When CR moves
inside, the small intestine is forced to expand. Based on
this, the geometric model between CR and intestine is
shown in Fig. 2. The central angle corresponding to the
connection area between the front end of CR and the small
intestine is a. CR is wrapped up by the small intestine
except part of its ends, and the whole geometrical shape is
axisymmetric. The mechanical model is also shown in
Fig. 2. CR is forced to move with a constant velocity v
c
. d
and D are the average wall thickness and inner diameter of
the small intestine. The interactive force of CR contains the
friction f and the circumferential pressure P. The direction
of the former is opposite to CR’s moving direction, while
that of the latter is perpendicular to CR’s shell. The contact
pressure on the tail end is neglected.
For further development of the model, the following
assumptions are made.
1. The material of the small intestine is incompressible.
2. The small intestine deforms symmetrically toward its
radial direction and its cross-sectional area is constant.
3. The deformation of the small intestine is the same as
the external shape of the contact surface of CR.
4. The small intestine deforms at a constant velocity.
3 Analytical Model of the Fluctuant Friction
It has been proved that the friction of CR is fluctuant when
CR moves in the small intestine with a constant velocity.
The whole process can be simplified to a simple physical
model, which is shown in Fig. 3 [29]. An infinitely long flat
car is placed on a smooth surface. One side of the car is
connected to the wall by a nonideal spring, which may be
nonlinear and include dampers. A slider is placed on the
flat car. The friction between them is f . The slider moves at
v
c
. The spring is used to express the stain and stress of the
small intestine in the longitudinal direction, while the
friction f represents the frictional resistance between CR
and the small intestine. The immediate cause is that the
relative sliding between CR and the small intestine appears
periodically. That is to say, relatively static state and rel-
ative motion alternate periodically when CR moves. The
root cause is that the small intestine is a soft tube, whose
material is anisotropic and hyperelastic. When CR moves,
the small intestine resists it; meanwhile, the small intestine
stretches. The critical condition of the relative motion is the
frictional resistance between CR and the small intestine
that equals the tension resulted from the stretch of the small
intestine. Therefore, relatively static state and relative
motion should be analyzed separately.
3.1 Relatively Static State
There is no relative sliding between CR and the small
intestine in the relatively static state. More precisely, no
relative sliding occurs on the front end of CR, but the small
intestine may be stretched or in the initial state. When the
Fig. 2 Interaction model between CR and intestine Fig. 3 Equivalent physical model
Tribol Lett (2016) 64:39 Page 3 of 11 39
123
剩余10页未读,继续阅读
2018-09-28 上传
2013-08-22 上传
2023-07-27 上传
2023-05-28 上传
2023-06-08 上传
2023-06-08 上传
2023-06-09 上传
2023-05-09 上传
2023-04-12 上传

weixin_38694566
- 粉丝: 5
- 资源: 878
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
