实时激光里程计与建图:LOAM算法解析
"这篇资源是关于LOAM(Lidar Odometry and Mapping in Real-time)论文的理解,主要讨论了如何利用六自由度两轴激光雷达实现实时的激光里程计和地图构建。论文中提出的关键难点是运动估计中的误差可能导致点云匹配错误。为了解决这个问题,作者提出了将定位和建图任务分开,通过并行运行的高频率低精度里程计算法和低频率高精度的点云匹配注册算法来达到高精度和实时性的目标。"
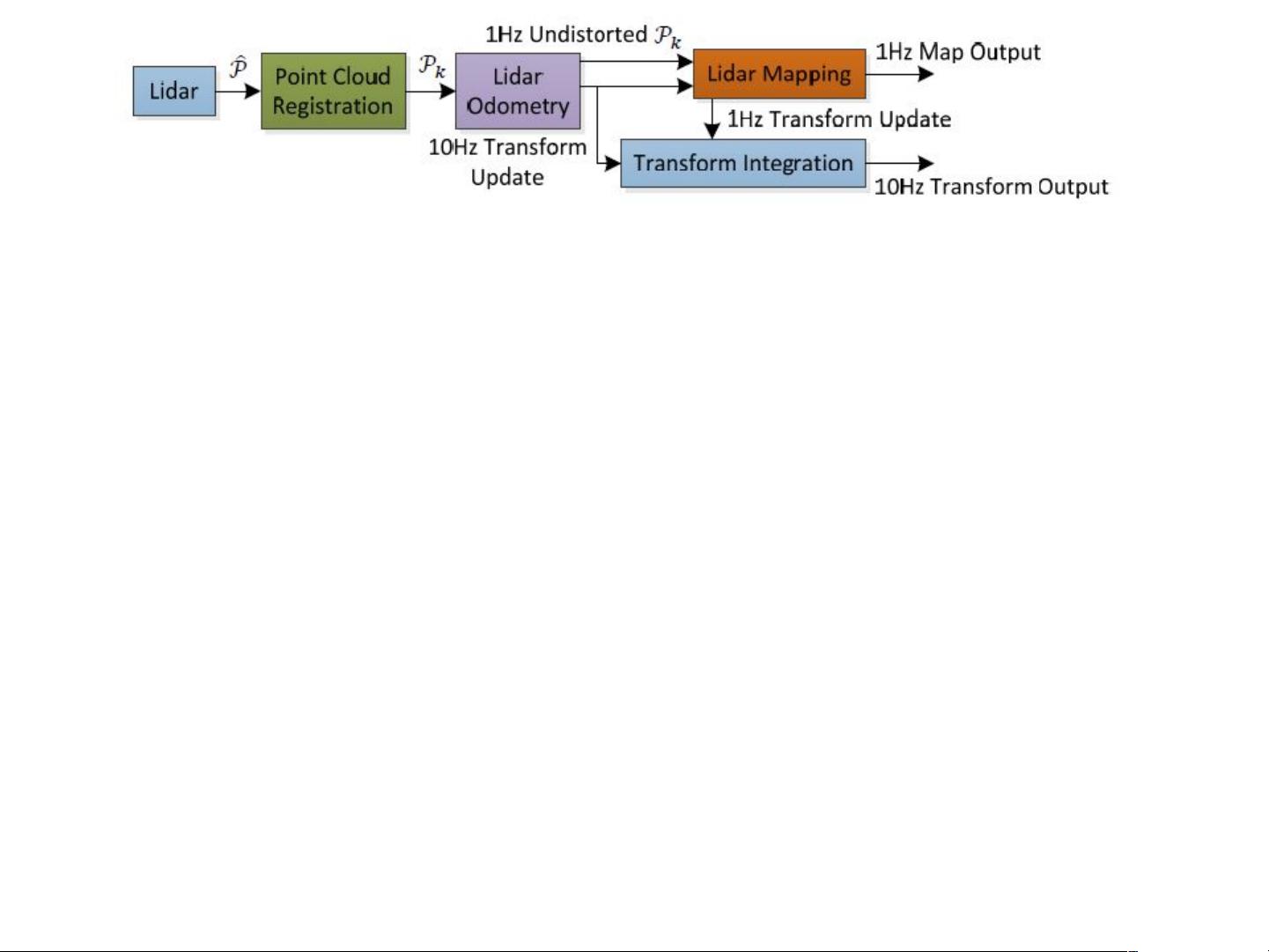
在LOAM系统中,主要有三个关键节点协同工作:
1. Lidar Odometry节点:它以10Hz的频率运行,负责估算两帧连续点云间的运动,以此消除运动畸变。这一步提供了频繁但可能不那么精确的运动估计。
2. Lidar Mapping节点:以1Hz的频率运行,利用已有的地图对无畸变的点云进行匹配和注册,旨在提高匹配的准确性和稳定性。
3. Transform Integration节点:结合上述两个节点的结果,以10Hz的频率进行信息融合,提供最终的高精度运动估计。
在特征点提取方面,LOAM区分了边缘点和平面点。曲率较大的点被认为是边缘点,而曲率较小的点则是平面点。为了均匀分布特征点并避免遮挡,每个扫描的点云会被分成四份,并从每份中选择特定数量的边缘点和平面点。特征点的选择还应避免已经选择过的点周围和与激光线近似平行的平面上的点,以及可能被遮挡的点。
在匹配和对应步骤中,LOAM在两次连续扫描之间寻找特征点的对应关系。对于每次扫描,都会确定边缘点集和平面点集,并尝试将它们投影到前一次扫描的坐标系中,以估计激光雷达的运动。边缘点对应于边缘线,平面点对应于平面,这一过程涉及在点云中寻找最近邻点,并检查它们的曲率以确认它们的特征类型。
LOAM方法通过高效地处理点云数据和巧妙地分离定位与建图任务,实现了激光雷达的高精度实时定位与地图构建,为移动机器人和自动驾驶等领域提供了重要的技术基础。
•
激光雷达接收点云数据
•
注册点云
•
Lidar Odometry 节点:获取两帧连续点云数据
间的运动,估计出来的运动用于去除 中的
运动畸变,频率为 10Hz
•
Lidar Mapping 节点:使用地图去匹配和注册未
畸变的点云数据,频率为 1Hz
•
Transform integraon 节点:接收前面两个节点
输出的信息并将其进行融合处理,频率为 10Hz
k
P
剩余19页未读,继续阅读
2022-09-23 上传
2021-06-09 上传
2020-07-26 上传
2023-09-03 上传
2021-09-13 上传
2023-05-19 上传

HelloJinYe
- 粉丝: 48
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
