80C51单片机驱动的智能避障小车设计与实现
本篇论文详细探讨了基于超声波测距的智能避障小车的设计与实现,以80C51单片机为核心控制器,结合科研项目的需求,构建了一个具备高度智能化的电动小车系统。80C51作为一款经典的八位单片机,因其易用性和多方面的功能深受开发者青睐,它在本设计中的主要作用是协调传感器数据、执行避障决策和控制小车的运动。
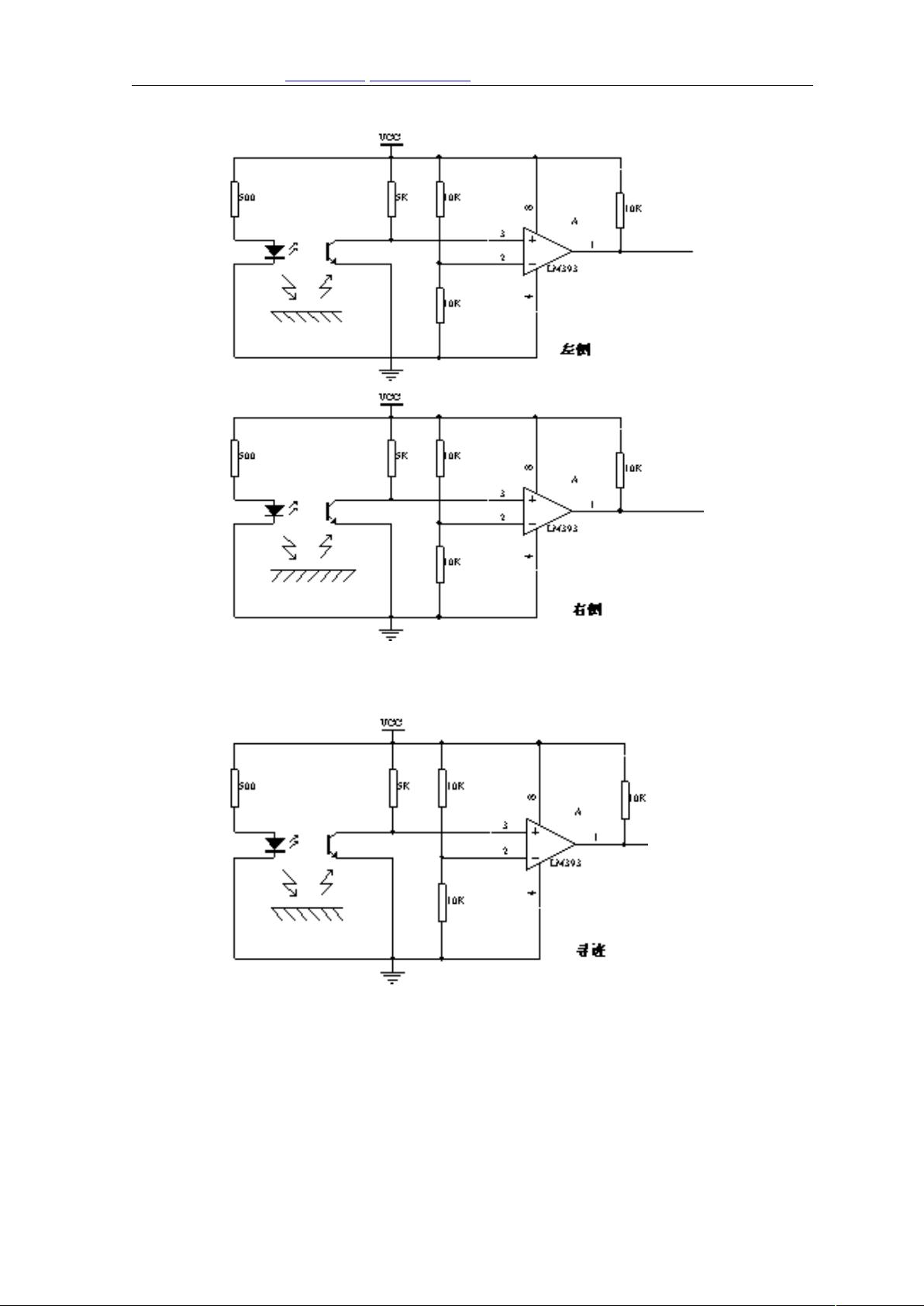
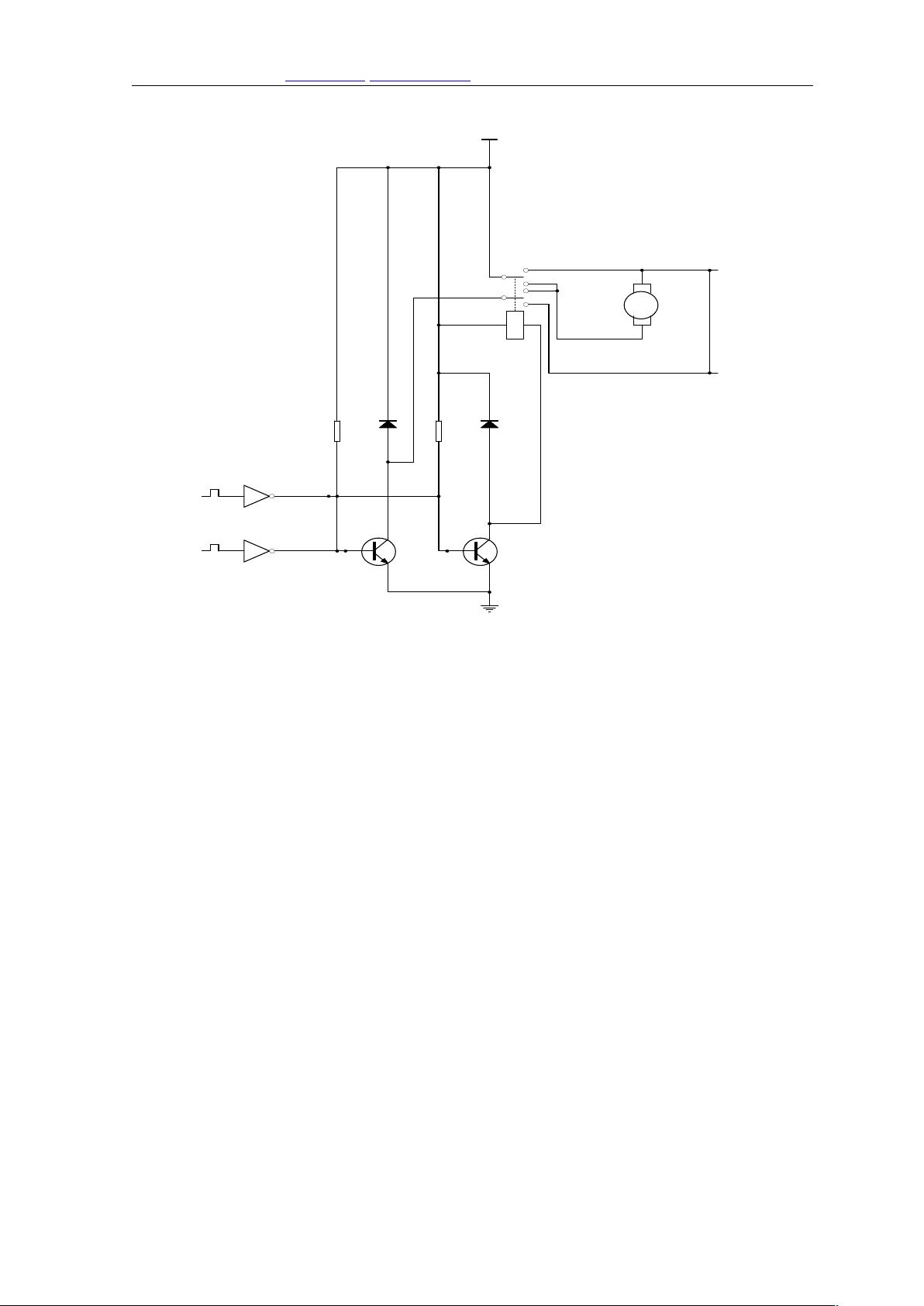
论文首先介绍了方案设计与论证部分,包括直流调速系统、检测系统(超声波传感器)、显示电路以及系统的整体原理图。直流调速系统用于调节电动小车的速度,而超声波传感器则负责实时测量小车前方的障碍物距离,确保其安全行驶。显示电路则提供了实时的信息反馈,如行驶状态、距离读数等。
硬件设计章节深入解析了80C51单片机的硬件结构,展示了最小应用系统设计,前向和后向通道的设计,以及显示电路的详细设计。80C51的主程序、显示子程序和避障子程序被分别设计和实现,以确保系统的稳定性和智能化。同时,为了提高系统的抗干扰能力和可靠性,文中还讨论了软件抗干扰技术和“看门狗”技术的应用,以及可编程逻辑器件的集成。
在软件设计方面,关键技术包括通过编程精确控制小车速度、有效应用超声波传感器获取环境信息、以及新型显示芯片的选择,以提供清晰的用户界面。此外,系统还具有自动记录时间和里程、速度追踪和自动寻光等功能,提升了整体的智能化水平。
实验部分展示了系统的测试数据和结果分析,证明了系统在实际操作中的性能满足设计要求。论文最后给出了致谢和参考文献,以及程序清单和硬件原理图的附录,为读者提供了完整的设计流程和技术细节。
这篇论文不仅详细介绍了基于80C51单片机的智能避障小车的硬件和软件设计,还展示了其在实际应用中的性能表现,对于研究者和爱好者来说,是一份非常有价值的实践指南。
剩余42页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
102 浏览量
2023-07-10 上传
2023-07-01 上传
177 浏览量
2023-07-07 上传
284 浏览量

wjzyran
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- spring事务支持
- 嵌入式操作系统的原理和应用
- ccna 实验 手册 配置
- 带复选框的 ExtJs tree
- protel99使用说明
- C#字符串的使用笔记(一)
- 我做的通讯组面试题C++的
- C#字符串的使用笔记(二)
- GridView 72般绝技(五)
- 编程修养(程序员需要注意的关于编程的注意事项)
- GridView 72般绝技(四)
- 中国移动MM7 API用户手册20040512.pdf
- 中国移动MM7 API用户手册20040512.doc
- 设置U盘的背景以及U盘的图表
- 通过isa防火墙的安全exchange rpc过滤器允许任何地点的outlook客户访问
- GridView 72般绝技(三)
