
DeepRoad: GAN-Based Metamorphic Testing and Input Validation Framework for ... ASE ’18, September 3–7, 2018, Montpellier, France
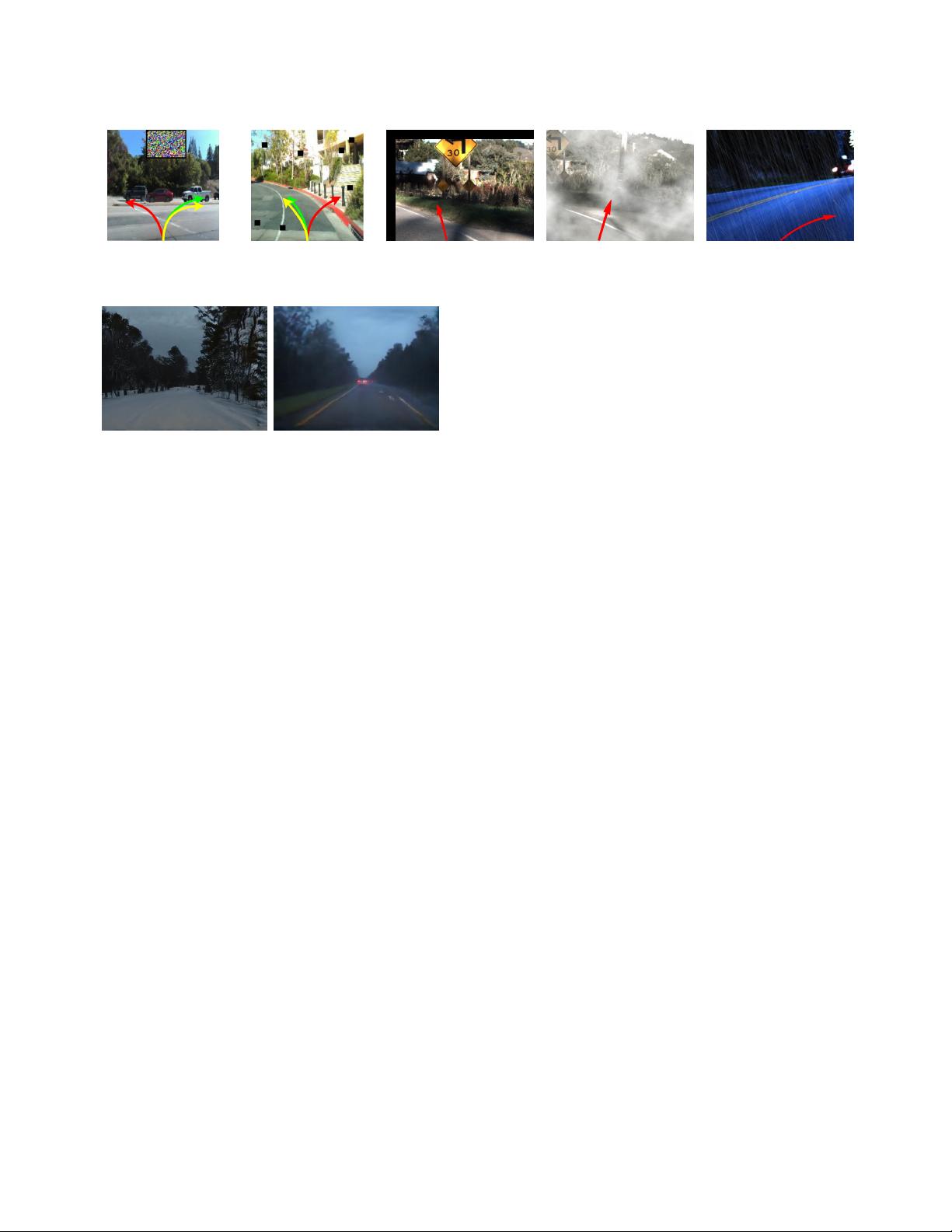
(a) Patch (b) Holes (c) Translation (d) Fog (e) Rain
Figure 1: Driving scenes synthesized by De epXplore (a)(b) and DeepTest (c)(d)(e)
(a) Snow (b) Rain
Figure 2: Snowy and rainy scenes synthesized by DeepRoad
eectively detect thousands of inconsistent behaviors of dierent
levels for these systems. Furthermore, we use DeepRoad
IV
to vali-
date the input images sampled from dierent driving scenes. The
results demonstrate that in the embedding space, the cluster of the
rainy and snowy image points are separately distributed to the clus-
ter of training images, however, the training cluster is mixed with
the majority of the sunny image points. It indicates that given a
proper threshold, DeepRoad
IV
can eectively validate input, which
potentially improve the system robustness.
The key contributions of this paper are as follows.
•
We propose the rst GAN-based metamorphic testing ap-
proach to generate driving scenes with various weather con-
ditions for detecting inconsistent behaviors of autonomous
driving systems.
•
We propose a novel approach to validate inputs for DNN-
based autonomous driving system. We present that the dis-
tance between the high-level features of training and input
images can be used for validating inputs.
•
We implement the proposed approaches in DeepRoad, which
can generate images of diverse driving scenes (e.g. rain and
snow) and measure the similarity between multiple image
sets in embedding space. We use DeepRoad to test well-
recognized DNN-based autonomous driving models and suc-
cessfully detect thousands of inconsistent driving behaviors.
Additionally, DeepRoad can accurately distinguish images
with extreme weather conditions to the training images,
which is eective to validate input for autonomous driving
systems.
2 BACKGROUND
Autonomous driving systems have been rapidly evolving in recent
years [
14
,
32
]. For example, many major auto manufacturers (in-
cluding Tesla, GM, Volvo, Ford, BMW, Honda, and Daimler) and IT
companies (including Waymo/Google, Uber, and Baidu) are work-
ing on building and testing various autonomous driving systems.
Typically, autonomous driving systems capture data from environ-
ment via multiple sensors (e.g. camera, Radar, Lidar, GPU, IMU, etc.)
as input, and use Deep Neural Networks (DNNs) to process data
and output control signals (e.g. steering and braking decisions). In
NVIDIA’s work [
14
], their autonomous driving system, DAVE-2
can uently control cars only based on the images captured by a
single front camera. In this work, we mainly focus on DNN-based
autonomous driving systems with camera inputs and steering angle
outputs.
2.1 DNN Architectures
To date, Convolutional Neural Network (CNN) [
23
] and Recurrent
Neural Network (RNN) [
33
] are the most widely used DNNs for
autonomous driving systems. Typically, CNNs are good at analyzing
visual imagery and RNNs can eectively process sequential data.
In this work, the evaluated models are built on CNN and RNN
modules. We briey introduce the basic concepts and components
of each architecture as follows, where more details about DNNs are
provided in [24].
2.1.1 Convolutional Neural Networks. Convolutional Neural Net-
works are similar to regular neural networks, which include a large
amount of neurons and pass information in a feed-forward way.
However, since the input data are images, several properties can
be applied to optimize the regular neural networks, where con-
volutional layer is a key component in CNNs. Instead of being
fully connected, a neuron in a layer only connects to some neu-
rons in the previous layer, and the computational process can be
presented as a convolution with kernels. Figure 3a shows an ex-
ample of CNN-based autonomous driving system that consists of
an input layer (images) and an output layer (steering angles), as
well as multiple hidden layers. Convolution hidden layers allow
weight sharing across multiple connections and can greatly save
the training eorts.
2.1.2 Recurrent Neural Networks. Regular neural networks and
CNNs are designed to process independent data, such as using CNN
to classify images. However, for sequential data like videos, the
neural networks should not only capture information of each single
frame, but are also expected to model the connections between them.
Unlike regular NNs and CNNs, RNN is a kind of neural network
with feedback connections. As shown in the left part of Figure 3b,
RNNs use loops to forward the previous states to input, which
model the connection of input data. The right part of Figure 3b
shows the workow of the unfolded RNN for predicting steering
angles based on a sequence of images. At each step, RNN takes
134
剩余10页未读,继续阅读

开发组老何
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


