爬杆机器人:多臂设计、电控与机械结构详解
版权申诉
175 浏览量
更新于2024-06-22
收藏 275KB DOC 举报
本文档是一份详细的爬杆机器人理论方案设计说明书,主要探讨了爬杆机器人的机械和电控设计。方案构思部分强调了采用三个手臂的设计,其中两个手臂用于抓握杆件,第三个手臂起稳定作用,利用齿轮齿条系统实现上下运动。手臂的灵活性允许上手臂有一定程度的旋转,而中间手臂通过反转齿轮齿条进行升降。
在机械部分,设计包括一个整体装配图,展示了三个手臂的布局。上手臂位于齿条顶端,下手臂固定在下杆C的齿条下端,中间手臂则连接在滑槽上。上臂和下臂的运动分别由滑槽上的电动机驱动,通过齿轮啮合实现;中间手臂通过反转齿轮齿条实现升降。路面行走结构则通过下手臂的三个车轮实现,确保机器人能在地面上灵活移动,后部的两个电机负责提供动力。
机械手的设计采用了曲柄滑块机构,通过橡胶皮的收缩和张开实现抓握和松开杆件的过程。滑块的移动与杆件结构配合,使得机械手在抱紧或松开时能精确控制抓力和自身升降。然而,由于抓持过程中力矩较大,需要考虑如何通过调整机械手臂与杆件的角度来减轻支撑板的受力,以实现更稳定的抓取。
电控部分虽然未在提供的内容中详述,但可以推测这部分会涉及电机控制策略、传感器集成以及可能的反馈机制,以确保机器人的精确控制和安全操作。这份设计说明书提供了爬杆机器人从概念到机械构造的深入剖析,展示了其复杂的机械设计和可能的控制策略。
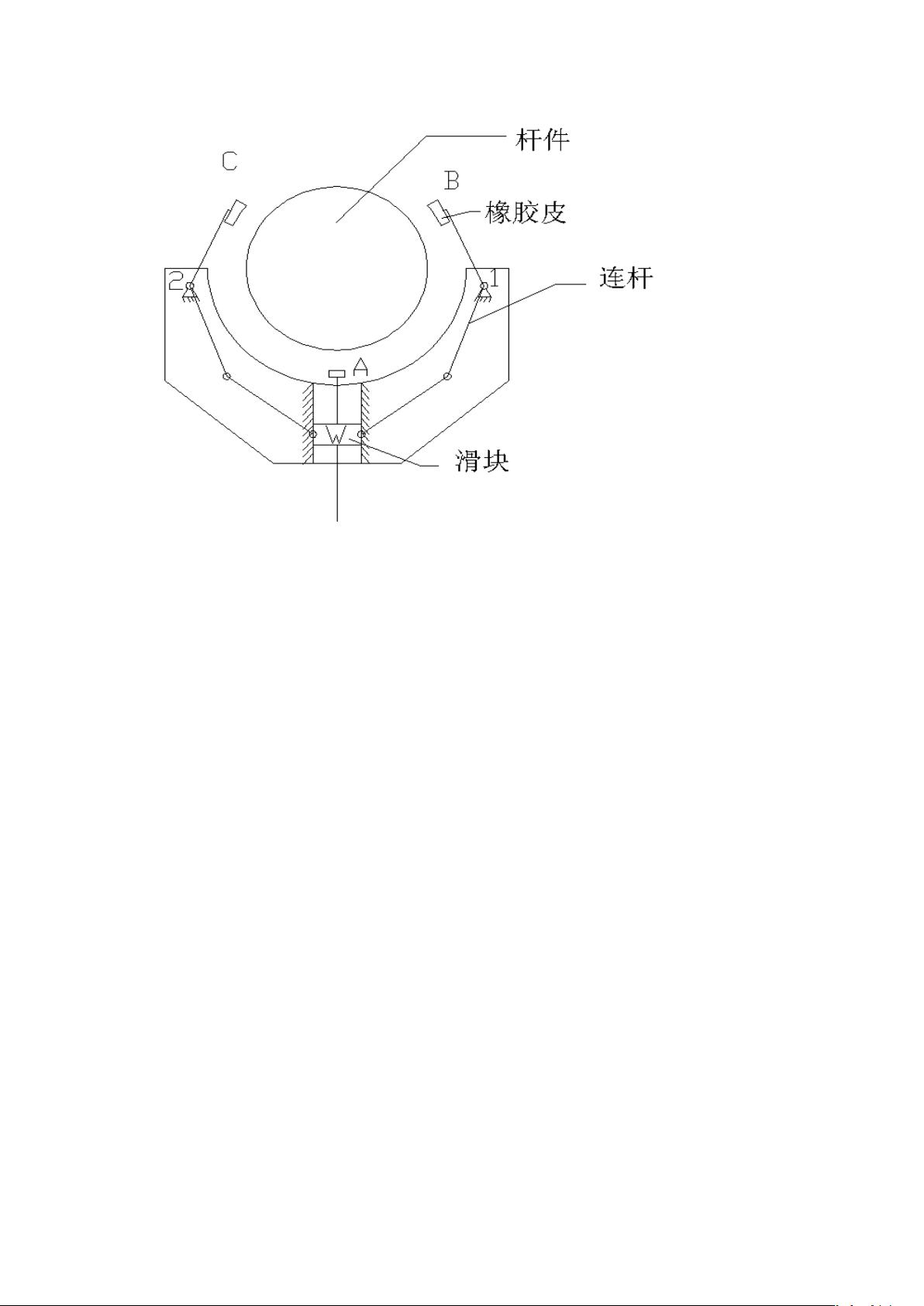
图 3 机械手的结构
我们设计的这个机器手采用了曲柄滑块机构,A,B,C 点处安装了橡
胶皮,1,2 两点固定在支撑板上,当滑块 W 向前移动时,根据杆子的结构,
A,B,C 点将向中心收缩,产生一个收缩的趋势,就抓紧杆件。当滑块 W
向后移动时,A,B,C 点会张开,即松开杆件。再配合机构的移动构件,
机械手就能很好的实现上升和下降。
在本方案中,由曲柄滑块机构的一系列动作,使机械手实现抱紧松开
的动作,机械手的夹紧依靠滑块使 3 个橡胶皮与构件紧紧地接触。在接触
的时间内实现另一个机械手的升降,在松开杆件的时间内实现自身的升降。
这两段时间的长度很难控制,可以说光靠电机是不可能实现的。此外考虑
到机械手垂直夹紧杆件时支撑板所受的力矩很大,难以锁住杆件,因此可
以改变机械手臂与杆件的角度来减小力矩,但角度不能太小,太小的话就
会使上升的速度变慢,因此角度应在 70——80 度之间为好,具体的角度要
计算后为准。
剩余16页未读,继续阅读
2023-05-27 上传
2023-06-09 上传
2023-06-28 上传
2023-10-12 上传
2023-05-25 上传
2024-01-06 上传

老帽爬新坡
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多传感器数据融合手册:国外原版技术指南
- MyEclipse快捷键大全,提升编程效率
- 从零开始的编程学习:Linux汇编语言入门
- EJB3.0实例教程:从入门到精通
- 深入理解jQuery源码:解析与分析
- MMC-1电机控制ASSP芯片用户手册
- HS1101相对湿度传感器技术规格与应用
- Shell基础入门:权限管理与常用命令详解
- 2003年全国大学生电子设计竞赛:电压控制LC振荡器与宽带放大器
- Android手机用户代理(User Agent)详解与示例
- Java代码规范:提升软件质量和团队协作的关键
- 浙江电信移动业务接入与ISAG接口实战指南
- 电子密码锁设计:安全便捷的新型锁具
- NavTech SDAL格式规范1.7版:车辆导航数据标准
- Surfer8中文入门手册:绘制等高线与克服语言障碍
- 排序算法全解析:冒泡、选择、插入、Shell、快速排序
