CVD工艺详解:入门到应用
版权申诉
CVD工艺,全称为化学气相沉积(CVD),是一种广泛应用于微电子工业的重要薄膜生长技术。CVD的中文名称源于其基本工作原理:通过将化学气体转化为固态物质在晶圆表面沉积,而产生的副产品通常是气体状态,从而在无需直接接触的情况下形成均匀、致密的薄膜。CVD工艺具有以下关键特点:
1. **低温优势**:CVD成膜过程通常在较低的温度下进行,相较于晶体材料的熔点,这显著降低了衬底材料的热应力,减少了形变和杂质引入的风险,特别适合于深亚微米甚至纳米级别的浅结工艺。
2. **成分调控性强**:CVD工艺允许对膜的成分进行精确控制,能够实现复杂的元素配比,为各种功能薄膜的制备提供了极大的灵活性。
3. **高效产能**:CVD的沉积速率较快,生产效率高,适用于大规模集成电路制造中的多种薄膜应用。
4. **良好的附着力和台阶覆盖**:形成的薄膜结构紧密,与基底结合良好,能够在复杂几何结构的器件上提供均匀的覆盖,这对于微电子器件的性能至关重要。
CVD根据不同的工艺条件和应用环境,可分为多种类型,如常压CVD (APCVD)、低压CVD (LPCVD) 和等离子体辅助CVD (PECVD) 等。每种方法都有其独特的优点和局限性:
- APCVD(如二氧化硅的制备)在大气压力下进行,但可能面临台阶覆盖能力和颗粒污染等问题,适用于如CMP抗磨层的制作。
- LPCVD则以高纯度和均匀性见长,适合大尺寸硅片处理,但需要较高的维护和真空系统支持,适用于高温下的薄膜沉积。
- PECVD利用等离子体增强反应,能实现低温快速沉积,适合于高密度应用,但成本较高,且对环境条件有严格要求,如用于金属钝化和Cu种子晶层的ILD制备。
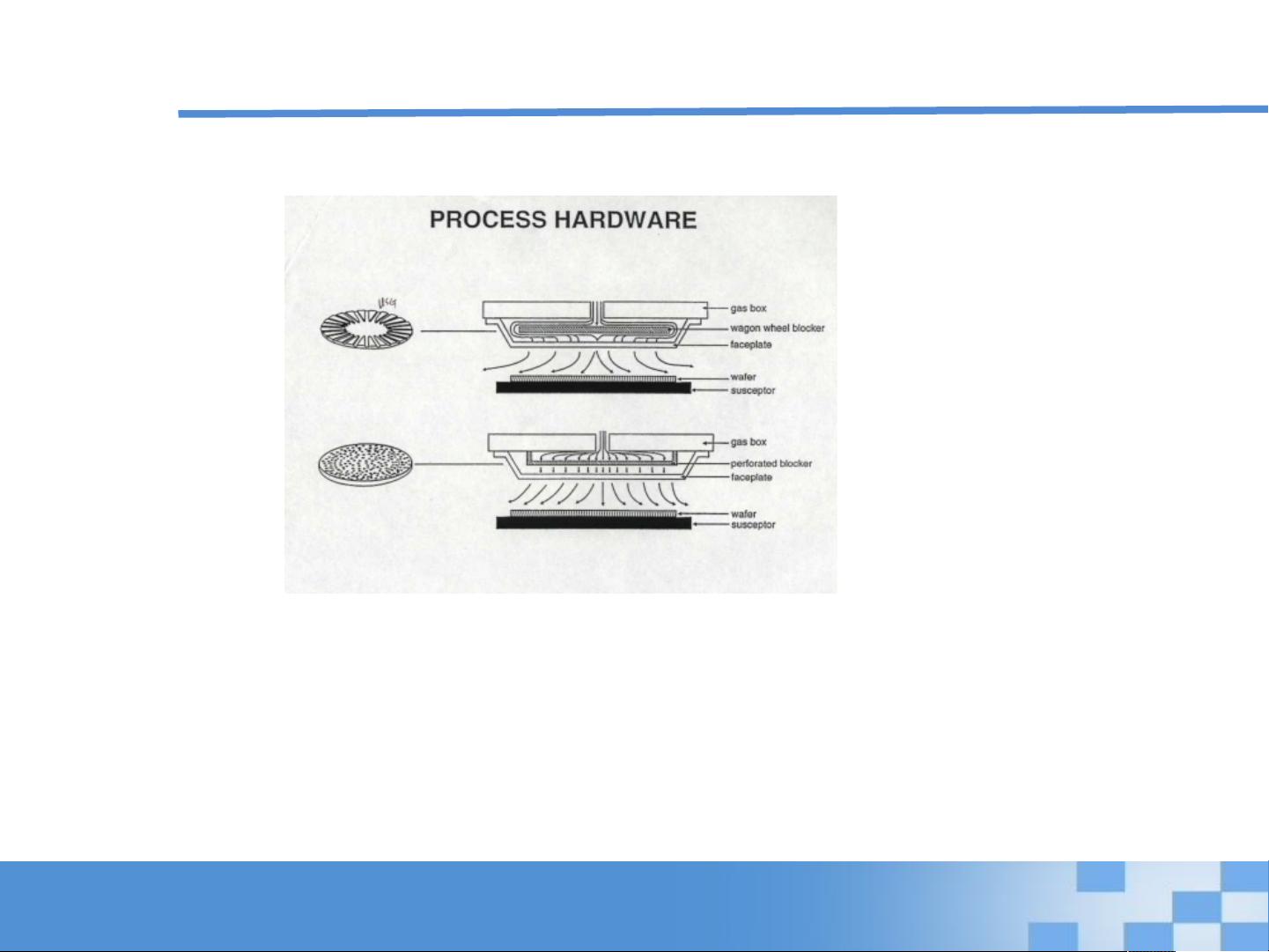
CVD工艺的示例包括反应器设计,如APCVD反应器通常包含加热器、晶圆传输系统以及气体控制组件。LPCVD采用垂直装载,以优化台阶覆盖和减少粒子污染。
了解这些知识点对于理解CVD工艺的基本原理、优缺点以及在微电子制造中的实际应用至关重要,对于从事相关领域研究、开发或生产的人来说,掌握这些技术基础是十分必要的。
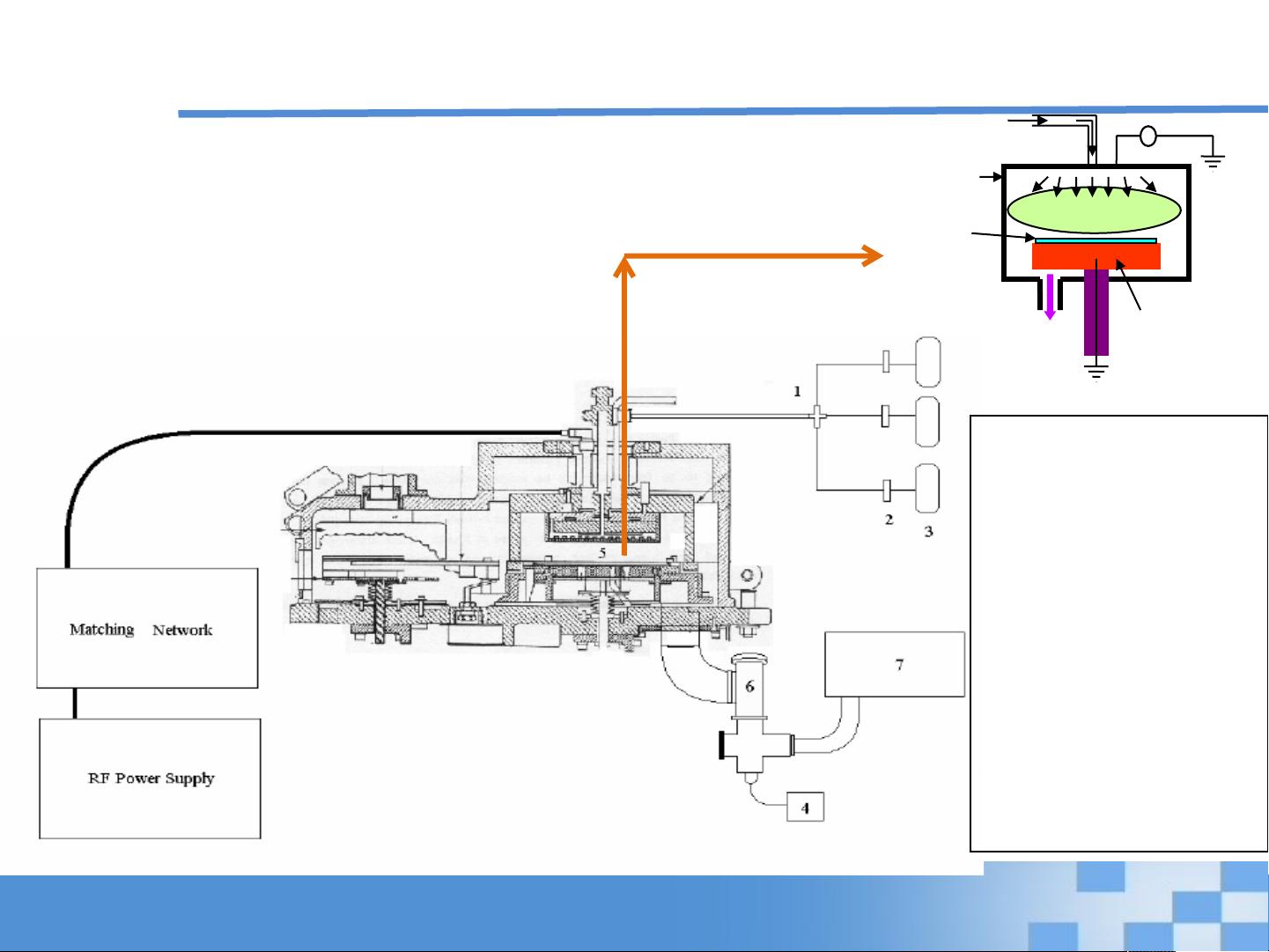
2.6 PECVD(P5000)结构
PECVD的九大部分
:
气源
气体供应管线
质量流量计
反应腔
加热和温度控制
系统
真空泵系统
压力控制系统
RF系统
排风
放大
制程
反应
室
制程
反应
室
副反应物
被pump抽
走
加热板
晶
圆
等离
子体
RF功率产生器
剩余57页未读,继续阅读
2024-09-05 上传
2024-09-05 上传
2024-09-05 上传

文档优选
- 粉丝: 92
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
