CAN2.0协议详解:标准与扩展格式
"CAN2.0中文协议"
CAN (Controller Area Network) 协议是一种广泛应用的现场总线标准,尤其在汽车电子系统、自动化设备和工业控制等领域。CAN2.0是其一个重要的版本,它扩展了原有的CAN1.2协议,以支持更大的报文识别位范围,从而满足更复杂通信需求。
在CAN2.0中,有两种报文格式:标准格式和扩展格式。标准格式使用11位标识符(ID),适用于简单的通信场景;而扩展格式则使用29位ID,提供了更大的地址空间,适合需要大量不同标识符的复杂系统。两种格式的存在使得CAN2.0能兼容不同需求的应用。
报文传输是CAN协议的核心部分,包括数据帧、远程帧、错误帧、过载帧和帧间空间等要素。数据帧用于传输实际的数据,远程帧用于请求数据,错误帧用于错误检测和报告,过载帧用于协调节点间的通信速率,而帧间空间则是保证节点之间正确同步的必要间隔。
发送器和接收器在CAN协议中有着明确的定义。发送器负责生成符合协议规定的报文,并将其发送到总线上;接收器则负责从总线上接收报文并进行解析。报文校验通过CRC(循环冗余校验)等方式确保数据传输的准确性。
编码方面,CAN协议定义了物理层的位编码方式,包括位的起始、同步、数据段、校验段和停止段等,以保证在不同网络条件下的可靠传输。错误处理机制包括错误检测和错误标定,一旦发现错误,节点会通过特定的信号通知网络其他成员。故障界定功能允许网络中的节点自我诊断,及时识别和隔离故障。
位定时要求是CAN协议的另一个关键部分,它确保了总线上的所有节点都能同步地传输和接收数据。CAN2.0还增加了对振荡器容差的处理,以适应实际硬件的时钟差异,确保网络的稳定运行。
CAN2.0协议提供了灵活且可靠的通信机制,能够满足各种复杂的实时通信需求。无论是标准格式还是扩展格式,都确保了CAN网络的高效、稳定和兼容性。在设计和实现CAN2.0系统时,需要深入理解这些概念并遵循相应的规范,以确保系统的正常运作。

广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
Co n t r o l
Fi e ld
AR BI TRATION F IELD
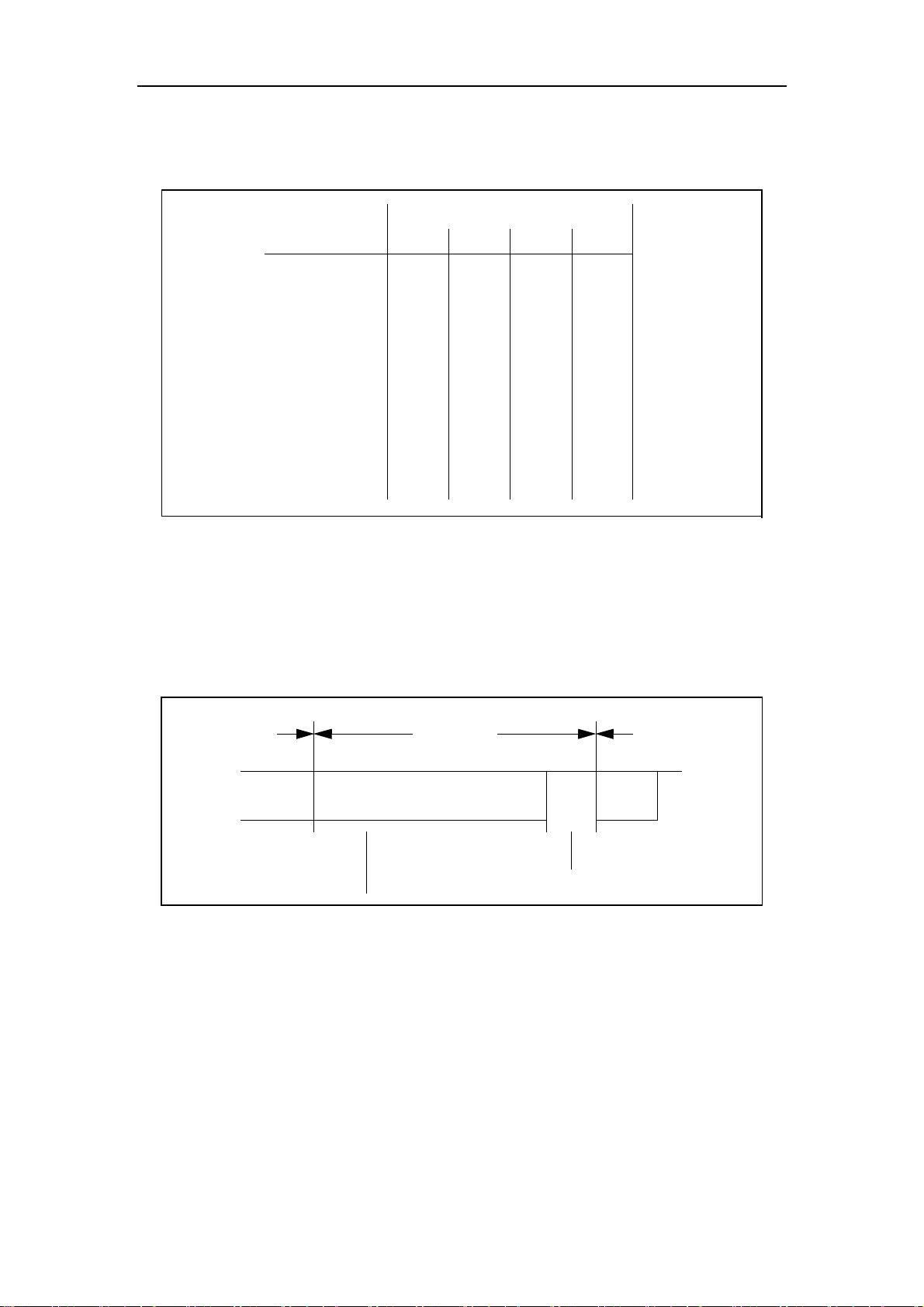
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
258 浏览量
2022-07-15 上传
2009-03-06 上传
2023-05-09 上传
2023-07-10 上传
2023-06-21 上传
2023-07-10 上传
2023-09-02 上传
2023-12-03 上传

Youngfon
- 粉丝: 3
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机控制系统 - pdf课件 - 第四章
- 计算机控制系统 - pdf 课件 - 第三章
- LVS手册,负载均衡的常用工具手册
- 计算机控制系统 - pdf 课件 - 第二章
- 计算机控制系统 - pdf课件 - 第一章
- 黑莓8100帮助文件
- cathedral_RL_v1.1.pdf
- Qt 嵌入式图形开发(入门篇)
- 音频 水印 学习 5656
- Qt编程初步(PDF格式)
- 南开出版的全国计算机二级C的习题
- <Adam品质保证>[原版][中文][官方手册]STC12C5A60S2(STC-51系列单片机)
- 常用SQL语句--全面
- 稳压电源基础 PDF
- wsbpel-v2.0
- TMS320DM642中文手册
