
3129
×
联系
我们
联系
我们
联系
我们
联系
我们
S
S
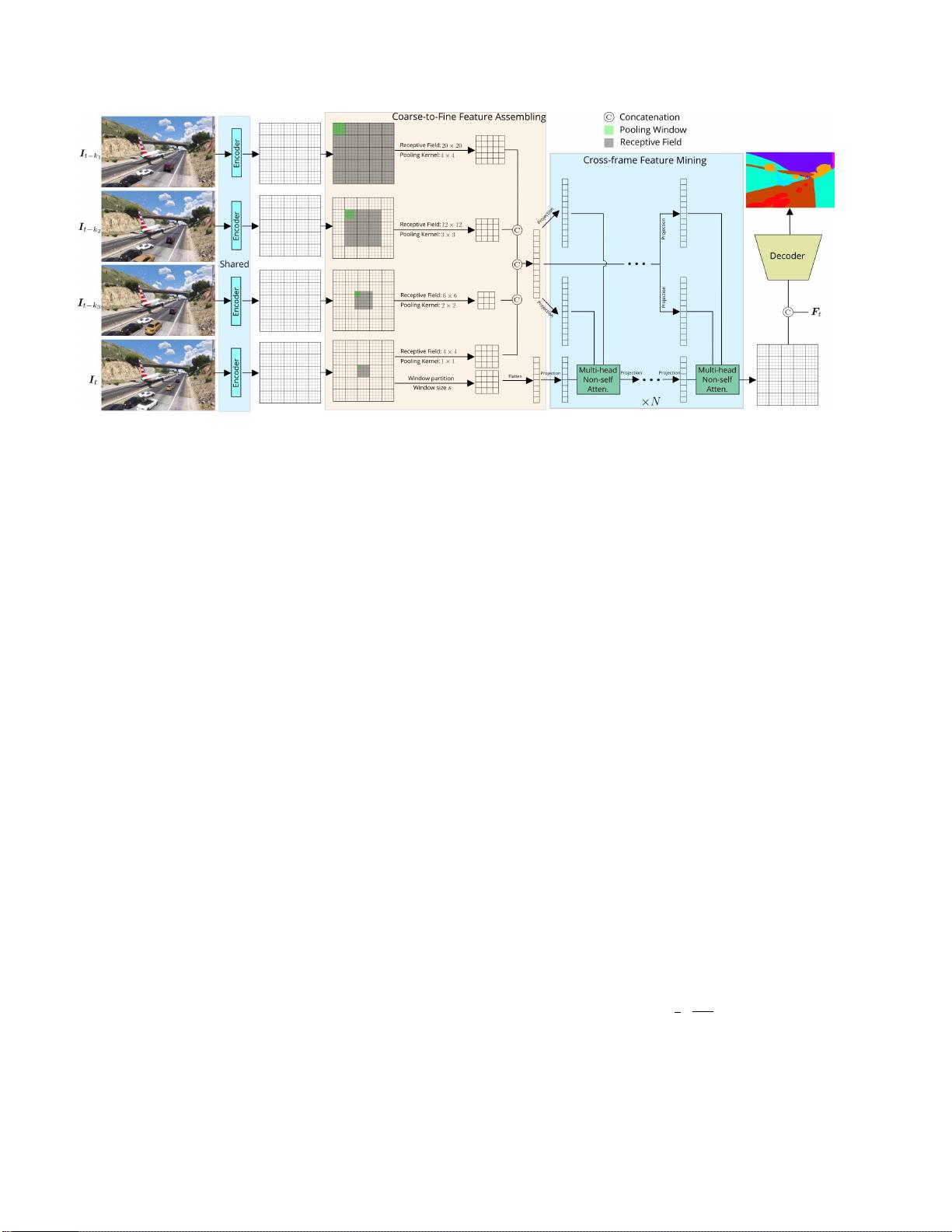
图2.概述拟议的粗到细特征挖掘。所有帧首先输入到编码器以提取特征,然后通过粗到精特征组装模块(CFFA)。通过不同
的池化策略处理不同帧的特征以生成上下文令牌。原理是对于更远的帧,使用更大的感受野和更粗的池化。所示的特征尺寸
(20 20)、感受野和池化核用于简单解释。所有帧的上下文标记被连接,然后由跨帧特征挖掘(CFM)模块处理。利用上下
文令牌来更新目标特征,由多个多头非自注意层。最后,我们利用增强的目标特征对目标帧进行分割
最好用缩放查看。
虽然视频内容可能跨帧改变,但是整体语义和环境将
不会改变很多,这意味着大多数视频内容可能仅具有
少量时间不一致性。第三,相邻帧之间的“静态”内容
的小的时间不一致性受第二次和第三次观察的启发,
通过相邻帧中的池化操作进行的变大小区域采样可以
传达多尺度上下文信息。因此,所设计的CFFA可以感
知多尺度的上下文信息(
静态上下文
)和
动态上下
文
。具体地,目标帧中的每个像素对应于更远帧中的
更大的感受野和更粗的池化,如图1B所示。二、请注
意,采样标记的长度比默认的自我注意中的长度短得
多。
CFFM的第二步,跨帧特征挖掘(CFM),旨在从
相邻帧的特征中挖掘有用的信息。这是一个基于注意
力的过程。然而,与传统的自我注意力[18,76,80]
不同,其查询,键和值来自相同的输入,我们建议使
用
非自我注意力
机制,其中查询来自目标帧,键和值
来自相邻帧。此外,在非自注意的迭代过程中,我们
只更新查询,这是直观的,因为我们的目标是从相邻
帧中挖掘信息,因此不需要更新上下文令牌与需要连
接和处理所有组装特征的自我注意相比,这种非自我
注意具有以下特点:
从而降低了计算成本。
3.2.
由粗到精的特征装配
在不失去普遍性的情况下,我们开始讨论 对 培
训 数据 含有 视频帧
{
I
t−k
1
,
· · ·
,
I
t−k
l
,
I
t
}
, 其具有
S
t−k
1
,
S
t−k
l
,
S
t
的地面真值分割
,并且我们专注于分割
I
t
。具体
地,
I
t
是目标帧,并且
{
I
t-k
1
,
· · ·
,
I
t-k
l
}
是l
个
先前帧,
{
k
1
,
...
,
k
1
}帧。 让我们将
U
={
t-k
1
,
···
,
t-k
l
,
t
}
表示
为所有帧下标的集合。 我们首先
使用 编码器处理
I
t
−
k
1
, ,
I
t
−
k
l
,
I
t
以 提取 信息
特征
F
=
F
t−k
1
, ,
F
t
−
k
l
,
F
t
,每个的大小为
R
h
×
w
×
c
(
h
,
w
和
c
分别表示高度,宽度和通道数)。我们的目标
是利用
F
生成更好的特征,用于分割
I
t
,因为在先前
的帧中存在相关的和有价值的视频上下文
为了有效地建立
参考框架特征(
F
t-k
1
,,
F
t-k
l
)和
目标框架特征
F
t
之间的远程交互
,我们提出了由粗到精的特
征组装模块,如图所示。二、受先前工作的启发
[56
,
79
,
87]
,我们将目标帧特征
F
t
拆分为窗口,每
个窗口关注一组共享的上下文令牌。这背后的原因
是,参加
- ing
在
F
t
中的每个位置到一组特定的上下
文令牌需要巨大的计算和内存成本。当使用
窗口大小为s×s,
Ft
被划分为
h
×
w
个
窗口。
剩余16页未读,继续阅读

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


