最少拍与大林算法在计算机控制技术中的应用解析
版权申诉
198 浏览量
更新于2024-07-16
收藏 4.83MB PPT 举报
"该资源是一份关于计算机控制技术的PPT,主要讲解了最少拍有纹波控制系统设计和大林算法的应用。内容涵盖了计算机控制系统的基本概念,如脉冲传递函数,以及数字控制器的设计方法,特别是如何通过已知的系统参数计算控制器的脉冲传递函数D(z)。"
在计算机控制技术中,最少拍有纹波控制系统是一种广泛应用的设计方法,旨在快速响应输入信号并减少稳态误差。这种设计的目标是使系统在最短的时间内达到设定值,同时限制输出的超调和振荡。
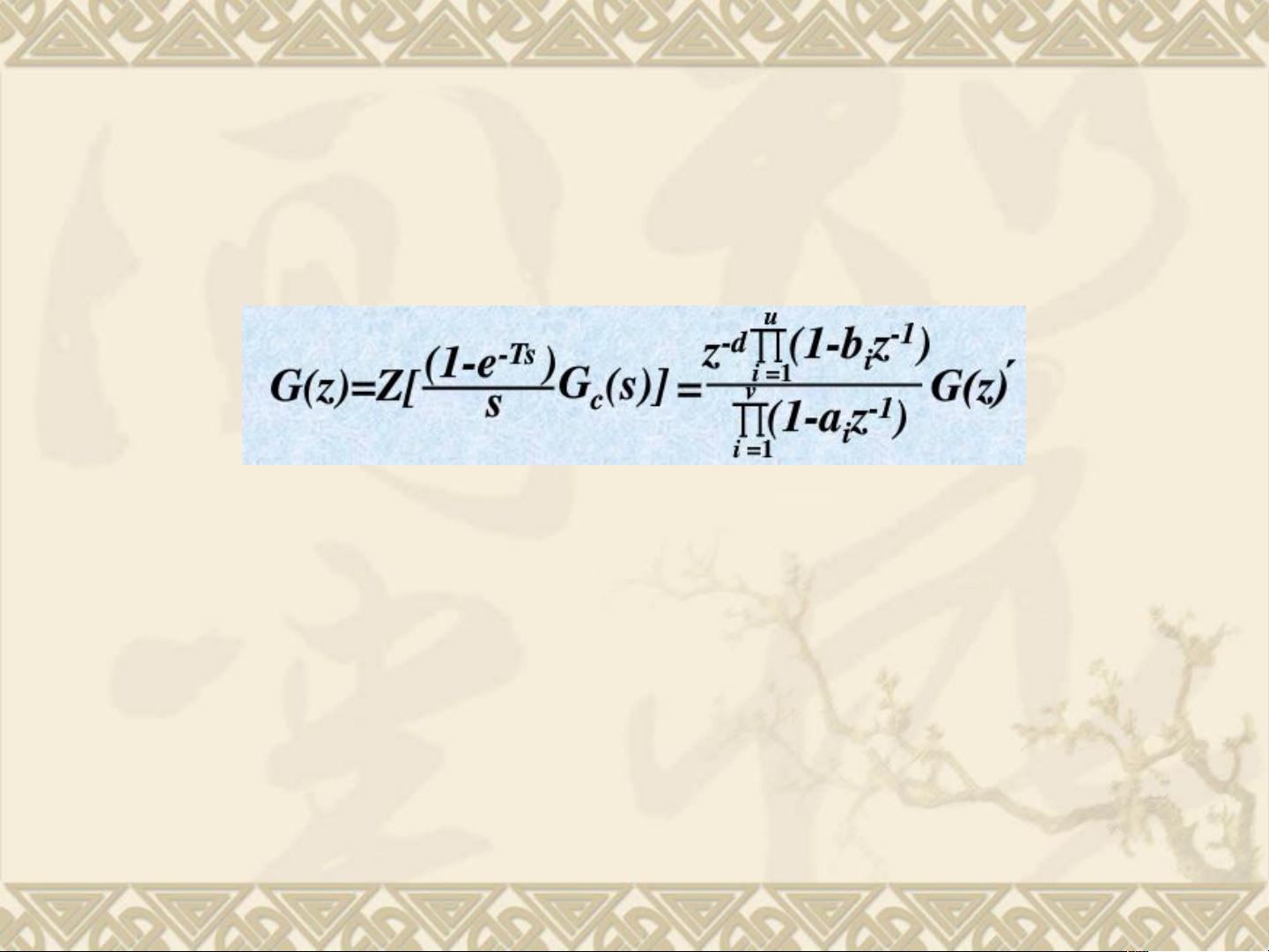
脉冲传递函数是数字控制系统分析的关键工具,它描述了系统中输入信号经过采样和量化后的输出与输入之间的关系。在给出的资料中,D(z)表示数字控制器的脉冲传递函数,Ho(s)是零阶保持器的传递函数,Gc(s)是控制器的传递函数,而G(s)则是广义对象(被控对象)的传递函数。这些函数通过Z变换联系起来,Z变换是将连续时间域的信号转换到离散时间域的数学方法。
一个典型的数字反馈系统结构由输入信号r(t)、误差信号e(t)、控制器输出c(t)和系统输出y(t)组成。通过误差脉冲传递函数E(z)和反馈脉冲传递函数R(z),我们可以分析系统的性能和稳定性。
设计数字控制器D(z)时,需要考虑两个主要因素:一是物理可实现性,即设计的控制器能够在实际硬件中实现;二是稳定性,确保控制器不会导致系统不稳定。通常,这涉及选择适当的控制器参数,如比例、积分和微分(PID)控制器的系数,以满足特定的性能指标,如上升时间、超调和稳态误差。
大林算法是一种常用的设计方法,用于计算满足特定性能指标的D(z)。该算法基于优化理论,可以确定数字控制器的参数,使得系统达到最少拍无纹波或有纹波的响应。通过已知的系统参数,如误差脉冲传递函数Φ(z)或其它性能指标,可以运用大林算法计算出合适的D(z)。
设计数字控制器的步骤包括:
1. 确定被控对象的传递函数G(s)。
2. 建立数字控制器模型,如比例、积分、微分控制器。
3. 根据期望的系统性能指标,如响应速度、超调量等,设置设计目标。
4. 应用大林算法或其他优化算法计算控制器的脉冲传递函数D(z)。
5. 分析D(z)的特性,确保其可实现且稳定。
6. 实验验证和调整控制器参数,以获得最佳性能。
总结来说,这份PPT详细介绍了最少拍有纹波控制技术和大林算法在数字控制器设计中的应用,为理解和实践计算机控制系统的分析与设计提供了重要的理论基础和计算方法。
最少拍系统设计中必须满足准确性、快速性、稳定性和
物理可实现性的要求,下面讨论最少拍有纹波控制系统的
设计方法。
G’(z) : G(z) 中不包含单位圆上和单位圆外的零极点。
u: G(z) 中单位圆上和单位圆外的零点数。
v: G(z) 中单位圆上和单位圆外的极点数。
剩余40页未读,继续阅读
2021-10-12 上传
2021-10-11 上传
2022-01-12 上传
2021-10-11 上传
点击了解资源详情
2022-05-29 上传
2021-10-12 上传
2009-09-24 上传
2022-05-30 上传

hualuodiewu
- 粉丝: 0
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- mapgis组件开发
- wireshark编译指南
- AIR教程-AIR教程
- 最新EJB 3.0实例教程
- 3天学透ActionScript
- Python 中文手册 v2.4
- 酒店管理系统--论文、说明书、数据库设计
- 防范企业数据泄密的六项措施.doc
- Ext2 核心 API 中文详解.pdf
- Estimation of the Bit Error Rate for Direct-Detected OFDM system
- Oracle+9i&10g编程艺术:深入数据库体系结构.pdf
- AIX 傻瓜教程UNIX
- 2008微思网络CCNP(BSCI)实验手册
- 《Full Circle》中文版第十二期
- SQL Server 2008基础知识
- 中国电信统一视图规范
