莱宝ScrollVac真空泵中文版操作指南:安全与安装详解
需积分: 10 150 浏览量
更新于2024-07-17
1
收藏 2.52MB PDF 举报
莱宝ScrollVac 1410xxVxx和1411xxAxx系列进口真空泵操作手册提供了详尽的安全指南和详细的操作步骤,确保用户在使用过程中能够遵循标准流程。该手册主要分为以下几个部分:
1. 警示标志说明:强调了各种潜在危险,包括机械、电气、热、物料和物质的危害,以及噪声防护,以确保用户在操作前了解并采取相应的预防措施。
2. 产品概述:详细解释了ScrollVacPLUS的单相(1-PH)和三相(3-PH)电型号的设计特点,包括气镇控制的使用和泵体所用的材料。还列出了随泵提供的设备和技术数据,以便于用户了解其规格和功能。
3. 运输与贮存:阐述了安全的运输方式和适宜的存储条件,确保真空泵在运输过程中不受到损害,并能在合适的环境中存放。
4. 安装:这部分包含安装步骤,如安全注意事项、系统设计考虑、正确的放置位置、以及如何正确连接真空系统和电源。特别提到了单相和三相电气连接的具体说明,包括远程监控和逻辑接口的接入。
5. 操作:详述了不同型号泵的运行模式,如自动、手动、接口运行,以及启动、停止、STANDBY状态的管理。此外,还介绍了如何处理抽极限压强、可凝蒸汽、关闭泵以及3-PH型号泵的紧急停机程序。
6. 维护:着重于操作安全,规定了维护周期和关键部件的检查保养,如进气口滤网清理、风扇罩清洁、性能参数检测、尖端密封更换、轴承更换等。针对1-PH型号泵,还提到更换控制器和电安全检查的步骤。对于维护指示灯的闪烁类型,也提供了相关提示。
莱宝ScrollVac操作手册作为专业工具,为用户提供了一个全面且系统的使用指南,旨在帮助用户高效、安全地操作真空泵,同时延长设备的使用寿命。无论是初次使用者还是经验丰富的技术人员,这份手册都是不可或缺的参考资料。
8
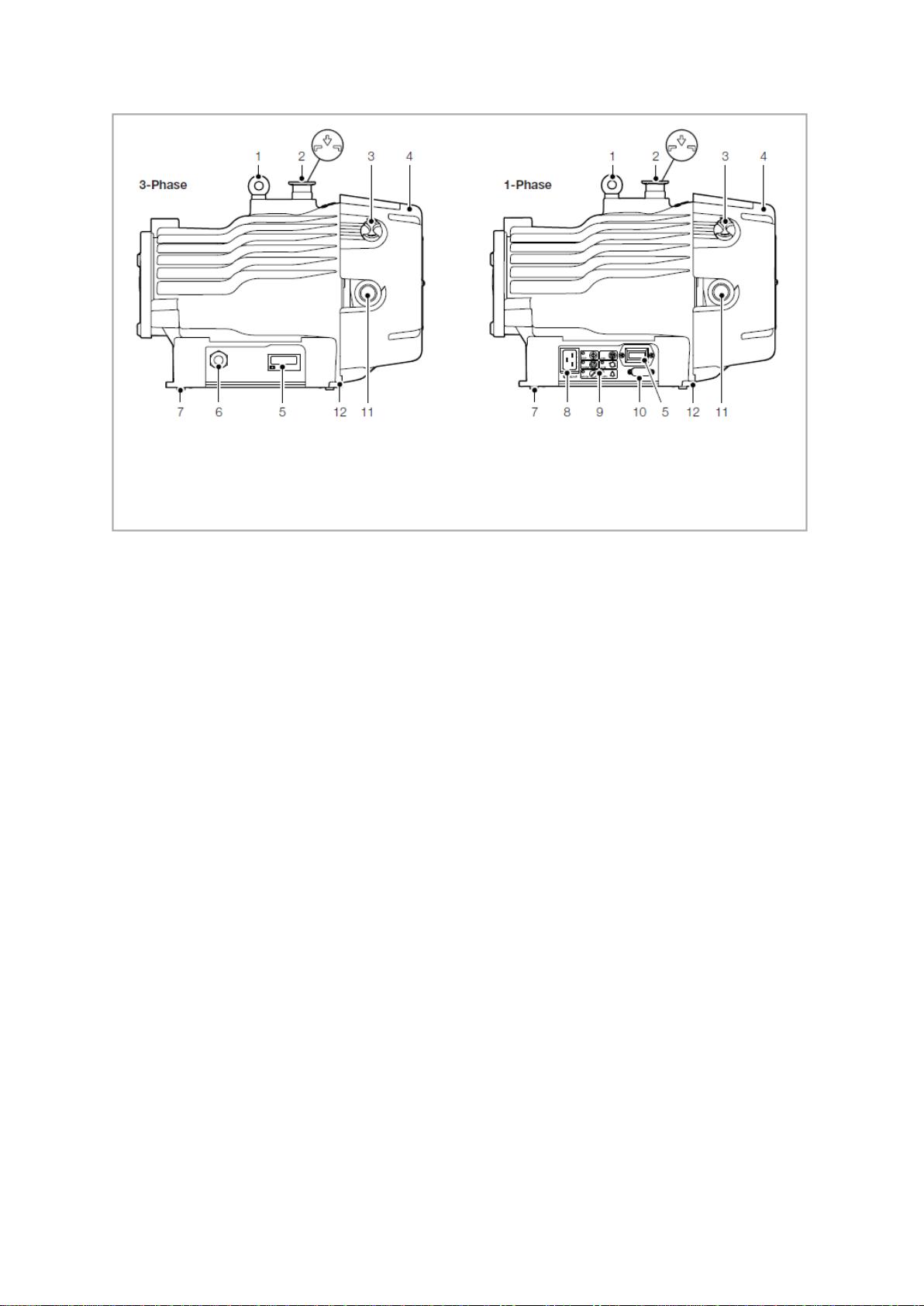
图 1 SCROLLVAC plus 三相电和单相电型号
1. 说明
1.1 设计
SCROLLVAC plus 三相电和单相电型号参见图 1。
SCROLLVAC plus 泵是纯粹的干式真空泵,因为其带有润滑介质的轴承室与抽真空室是
完全隔离的。泵可以用于抽蒸汽的工艺,也可以用于一些含腐蚀性介质的工艺。用于抽可燃
性气体工艺时请咨询莱宝。
泵体内包含定涡轮和动涡轮结构。电机通过安装在电机轴上的偏心曲柄控制动涡轮的移
动。动涡轮移动时,和定涡轮之间啮合形成连续的月牙形空间,进入泵内的气体从外沿向定
涡轮的中心压缩,并最终从连通到定涡轮中心的排气管路排出泵外。
1.2 SCROLLVAC plus 1-p 单相电型号
泵的控制器
单相电型号的泵内部集成了控制器,它可以识别不同的 1 相供电条件并自我调整,最终
输出并驱动泵内 3 相电机运行在 60Hz 频率。控制器通过监视功率和温度保护真空泵,以避
免其运行于过高负载或故障条件下可能造成的损坏。
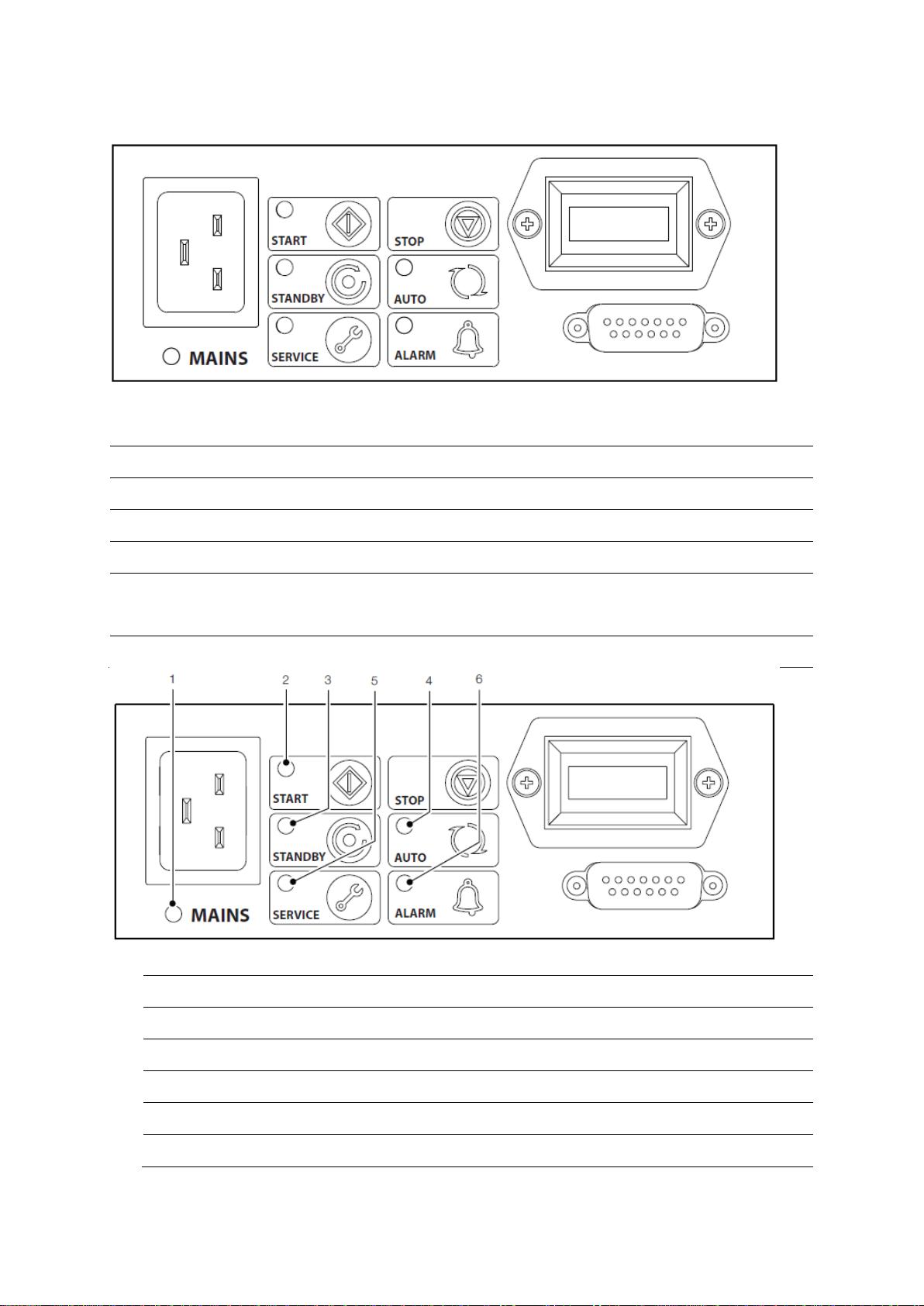
控制器提供了控制界面,可采取两种方式运行:
手动。通过控制面板上的按钮操作,参考图 2 和图 13。
远程。通过 15 针 D-SUB 的数字 I/O 接口。
逻辑接口
可以通过 15 针 D-SUB 的数字 I/O 接口操作控制器。信号形式如下:
控制输入:开关形式信号,用于泵的控制
1,吊耳
2,进气口 DN25 ISO-KF
3,气镇旋钮
4,冷却风扇
5,计时显示
6,3 相电型号穿线口
7,橡胶地脚
8,电源线插口(仅 1 相电型号)
9,控制面板
10,数字 I/O 接口
11,排气口 DN25 ISO-KF
12,接地端子
剩余44页未读,继续阅读
2024-06-23 上传
2023-02-06 上传
2024-09-05 上传
2024-09-05 上传
2024-09-05 上传

hbxfluo
- 粉丝: 2
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
