四元数在误差状态卡尔曼滤波中的关键作用:3D旋转与估计
需积分: 9 56 浏览量
更新于2024-07-03
收藏 5.86MB PDF 举报
"本文主要探讨了四元数在误差状态卡尔曼滤波器中的应用,特别是针对3D空间中的旋转和姿态估计问题。四元数是一种扩展复数的数学结构,由两个实部和两个虚部组成,能够紧凑地表示三维空间中的旋转。Cayley-Dickson构造方法使得四元数的定义变得直观,它允许我们将二维平面的旋转用单个复数表示,而三维旋转则通过双四元数的乘积实现。
论文深入解析了旋转群和李群的理论,强调了在四元数和旋转矩阵之间转换时的公式和概念。作者特别关注了旋转扰动、导数和积分的处理,提供了丰富的几何和直观解释,以便读者理解三维旋转的内在机制。在实际应用中,惯性测量单元(IMU)的信号处理是关键,利用这些信号,误差状态卡尔曼滤波器能够准确地融合传感器数据,估计和跟踪物体的运动状态。
文章还澄清了四元数的不同定义和约定,如汉密尔顿约定和左手四元数等,指出不同的书写形式可能导致细微的计算差异。为了确保一致性,作者建议在讨论过程中先明确这些数学细节,特别是对于初学者来说,理解这些基本概念至关重要。
四元数的表示方式通常采用实部与矢量部分相结合,写作形式为 ,其中 是实部,而 向量部分代表旋转。这种表示方式有助于简化姿态估计和滤波过程中的数学运算。通过结合四元数的性质,误差状态卡尔曼滤波器能够高效地处理复杂的动态系统中的噪声和不确定性,为导航、机器人控制等领域提供精确的估计结果。
这篇论文是一份实用的指南,不仅涵盖了四元数的基础理论,还展示了如何将其应用于实际的误差状态卡尔曼滤波器设计,是从事3D旋转估计和控制技术研究者的重要参考资料。"
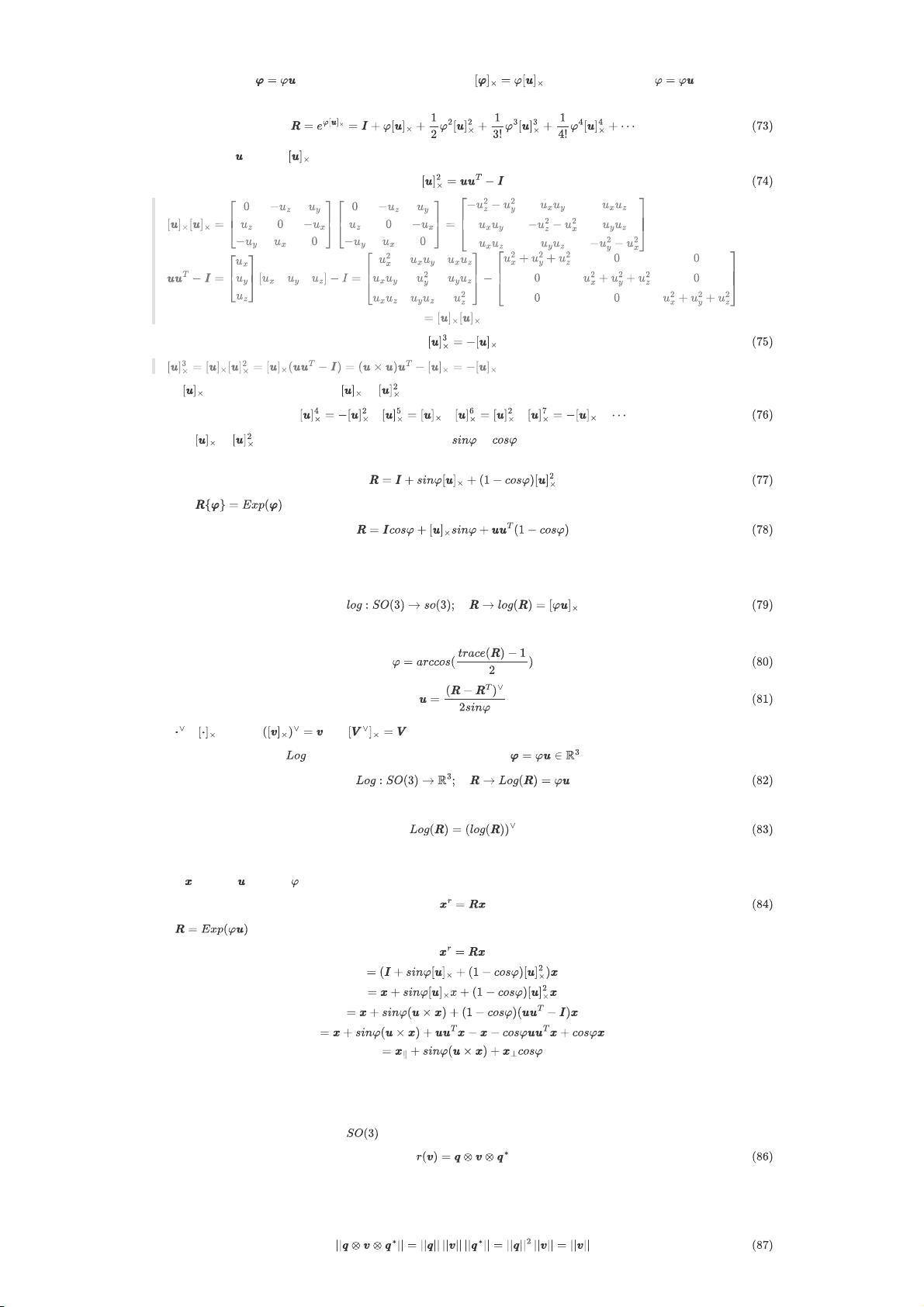
2.3.3 旋转矩阵和旋转向量:罗德里格斯旋转公式
旋转矩阵是从旋转向量 通过指数映射(69)定义的,叉积矩阵 定义在(20)中。 使用 的(69)的泰勒
展开如下,
当应用于单位向量 时,矩阵 满足
, 而
因此, 的所有幂可以在循环模式中用 和 表示
然后,用 和 对泰勒级数进行分组,并在它们中分别识别 和 的级数,得到一个从旋转向量获得旋转矩阵的封闭形式,
即所谓的罗德里格斯旋转公式
我们记为 。这个公式有一些变体,例如,使用(74),
2.3.4 对数映射
我们将对数映射定义为指数映射的逆
其中
其中 是 的逆,即 以及
我们还定义了一个大写版本的 ,它允许我们直接从旋转矩阵中恢复旋转向量 ,
它与对数映射的关系是显而易见的,
2.3.5 旋转行为
将向量 绕单位轴 旋转角度 是通过线性乘积进行的
其中 。这可以通过使用(77)、(74) 和(75)展开(84)来表达
这正是向量旋转公式(54)。
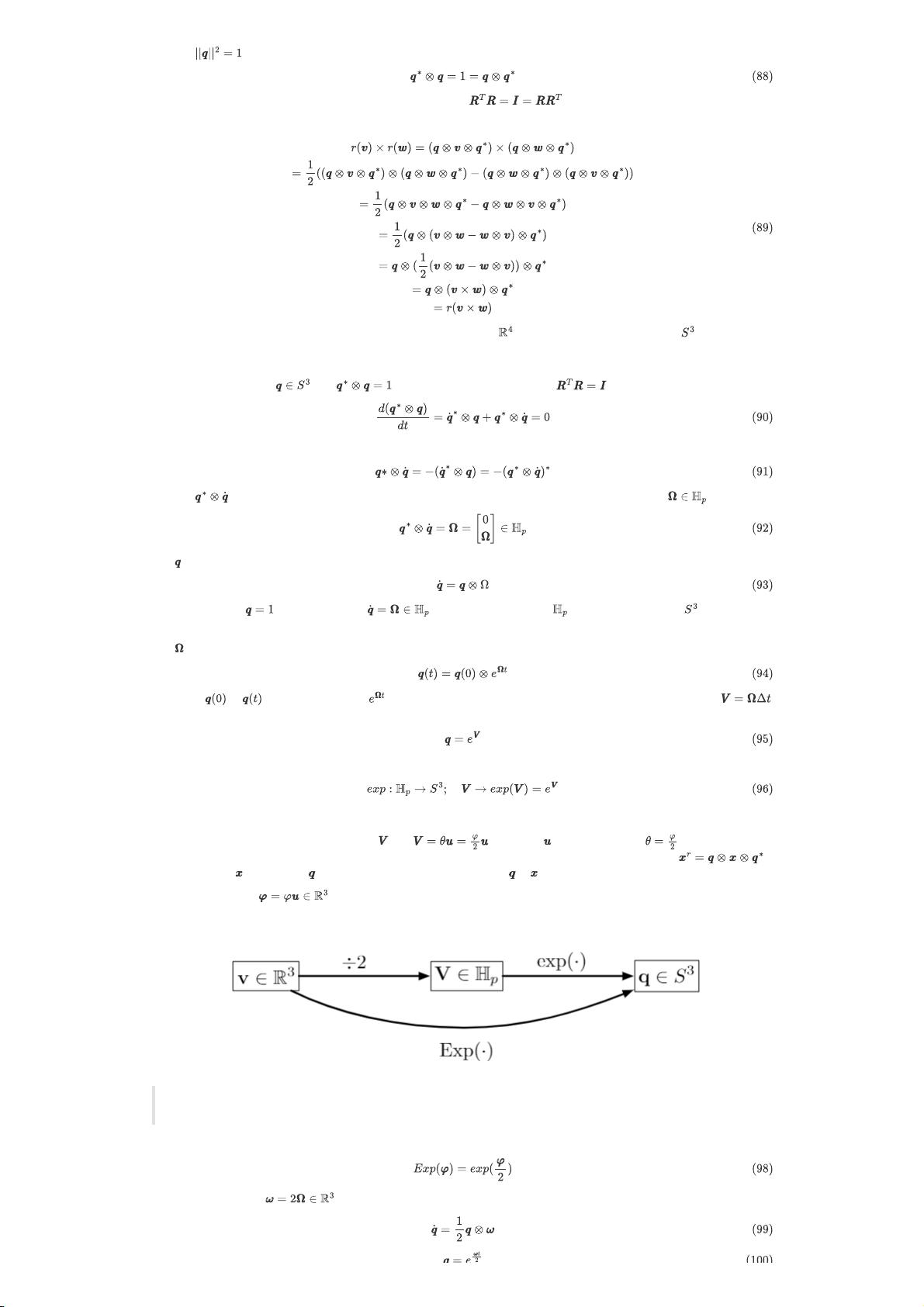
2.4 旋转群和四元数
出于教学目的,我们有兴趣突出作为旋转群 的表示的四元数和旋转矩阵之间的联系。为此,众所周知的四元数旋转行为公式为
它在这里最初被视为一个假设。这使我们能够开发完整的四元数部分,其中的术语沿袭了我们用于旋转矩阵的术语。这个假设的准确性将在
稍后的第 2.4.5 节中得到证明,从而验证该方法。
然后让我们将上面的旋转代入正交条件(55a),并使用(27)进行展开
剩余42页未读,继续阅读
318 浏览量
点击了解资源详情
点击了解资源详情
586 浏览量
875 浏览量
285 浏览量
318 浏览量
2021-09-27 上传
156 浏览量

weixin_44035919
- 粉丝: 12
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 节点层
- ROS-for-Covid-Application
- Java打砖块儿游戏代码
- 连锁特许经营知识培训(5)DOC
- optee-rs:专为optee设计的防锈漆
- streamify-app
- 初级java笔试题-Interview:让我们学习那些白板
- 罗莱专卖店经营成功案例分析培训DOC
- 易语言源码易语言例程更新自身防误报.rar
- 霍夫曼编码:Python中的School项目
- java笔试题算法-topictiling:TopicTiling是一种基于LDA的文本切分方法
- Công Cụ Đặt Hàng Đặt Hàng Đà Nẵng-crx插件
- mjwedding:WordPress主题婚礼
- 易语言源码易语言使系统控制菜单失效源码.rar
- url:解析,构建和处理URL
- 营业厅课程培训——营业厅现场管理
