电磁导航智能小车:三次函数算法与差速控制
171 浏览量
更新于2024-08-28
2
收藏 309KB PDF 举报
"基于三次函数的电磁导航智能小车设计,采用‘五横二竖加八字’排列的电磁线圈,利用Kinetis K60单片机,结合三次函数算法与差速电机算法实现稳定寻线。"
本文主要介绍了一种基于三次函数算法的电磁导航智能小车设计,其目标是使小车能够在复杂赛道上实现稳定快速的自动寻线。这种设计采用了特殊的电磁线圈布局——“五横二竖加八字”,能够有效地识别并应对各种赛道情况,包括直角弯、坡道和障碍等。
智能小车寻线的关键在于其路径识别技术。在赛道中央,铺设了一条直径为0.5毫米的铜质漆包线,漆包线内部携带20±2 kHz频率、50~150mA电流的正弦波信号。通过电磁线圈作为感应传感器,小车能够感知到这条线路的存在,并据此进行导航。
核心算法部分,文章提到了三次函数算法用于计算小车偏离线路的偏差。这种算法能够精确地计算出小车相对于中心线的位置偏差,从而为后续的控制策略提供数据支持。同时,针对弯道处理,设计中采用了差速电机算法。差速驱动允许左右两侧电机以不同的速度旋转,以此来调整小车的转弯半径,确保在弯道上的稳定性和准确性。
硬件系统方面,智能小车由多个模块组成,包括Kinetis K60微控制器作为主控单元,负责处理来自传感器的数据和控制其他模块。传感器模块用于检测赛道信号,舵机控制模块用于转向,电机驱动模块则控制小车的前进和后退。此外,还有OLED显示模块用于信息显示,拨码开关模块用于配置,编码器测速模块用于监测速度,停车检测模块用于判断是否到达终点或遇到障碍,障碍检测模块则用于避障。电源模块由7.2V镍镉电池供电,通过不同稳压芯片为各个模块提供稳定的工作电压。
整个系统的设计和实践证明,这种基于电磁导航的智能小车能够准确、快速地沿着设定线路行驶,满足了对复杂赛道适应性的需求,实现了预期的寻线和导航功能。这种设计不仅展示了现代微电子技术在智能车辆中的应用,也为未来更高级别的自动驾驶系统提供了有价值的参考。
基于三次函数的电磁导航智能小车设计基于三次函数的电磁导航智能小车设计
摘要:为了实现智能小车稳定快速的自动寻线,采用了“五横二竖加八字”排列的电磁线圈,能识别各种复杂的赛
道。通过三次函数算法求出偏差,并采用差速电机算法处理弯道,实现了电磁导航的功能。实践证明,该系统
能精准地控制智能小车稳定快速地运行,且达到了预期效果。航 智能小车寻线道路设计要求是:在中间铺
设了一条直径为0.5 mm的铜质漆包线,漆包线中有频率范围为20±2 kHz、电流范围为50~150 mA的正弦波信
号。随着智能小车的发展,需适应更加复杂的赛道,例如直角弯、坡道、障碍等。文中设计的智能小车,是基
于Kinetis K60单片机开发实现的,以电磁线圈作为感应传感器,采用偏差算法控制小车精准
摘要摘要:为了实现智能小车稳定快速的自动寻线,采用了“五横二竖加八字”排列的电磁线圈,能识别各种复杂的赛道。通过三
次函数算法求出偏差,并采用差速电机算法处理弯道,实现了电磁导航的功能。实践证明,该系统能精准地控制智能小车稳定
快速地运行,且达到了预期效果。航
智能小车寻线道路设计要求是:在中间铺设了一条直径为0.5 mm的铜质漆包线,漆包线中有频率范围为20±2 kHz、电流
范围为50~150 mA的正弦波信号。随着智能小车的发展,需适应更加复杂的赛道,例如直角弯、坡道、障碍等。文中设计的
智能小车,是基于Kinetis K60单片机开发实现的,以电磁线圈作为感应传感器,采用偏差算法控制小车精准的寻线功能,从
而实现智能小车智能快速稳定的寻线行驶。
1 硬件总体设计硬件总体设计
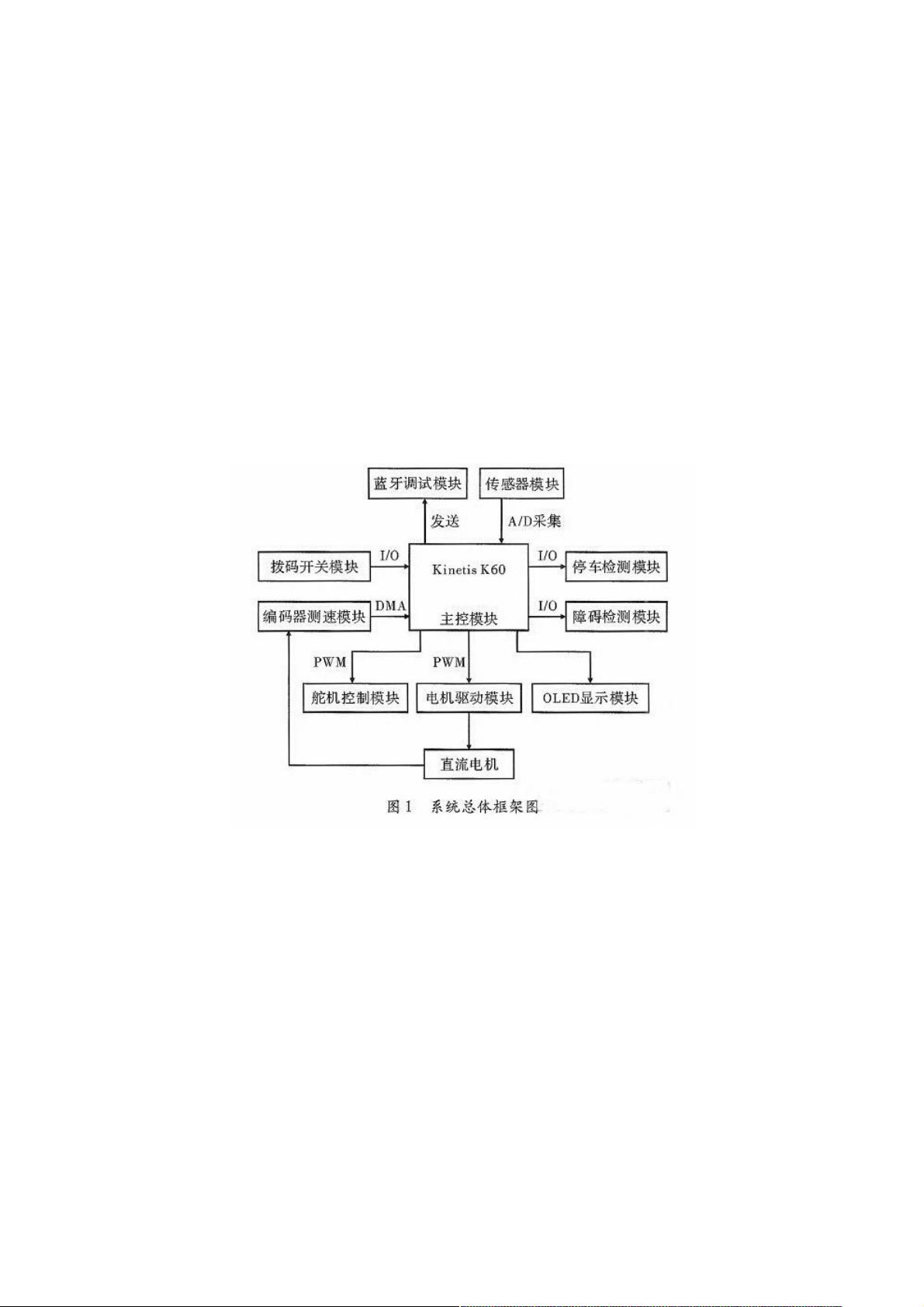
智能小车系统由Kinetis K60主控模块、传感器模块、舵机控制模块、电机驱动模块、OLED显示模块、拨码开关模块、编
码器测速模块、停车检测模块、障碍检测模块这9个部分构成。系统总体框架如图1所示。
除了以上9部分外还有电源模块,整个智能小车由7.2 V镍镉电池供电,其中由LM1117稳压芯片输出3.3 V为主控芯片
K60、拨码开关模块、停车检测模块、OLED显示模块提供电源。由一块LM2940稳压芯片得到5 V电压单独供给传感器模块,
另一块LM2940稳压芯片得到5V电压分别供给蓝牙调试模块、障碍检测模块、编码器测速模块和电机驱动模块,此外,通过试
验可发现,S3010 Futaba舵机可直接加7.2 V电压,此时舵机的响应速度也会提高,所以可直接将电池电压作为舵机的电源。
舵机控制模块和直流电机均用7.2 V电压驱动。
电磁线圈采集到的交变电压信号经双运算放大器MAX4451放大后,通过二极管的二倍压检波电路将交变的电压信号检波
形成直流信号,然后再通过单片机的A/D转换电路进行采集,获得正比于感应电压幅值的数值。
智能小车是以双电机方式工作,故采用4块BTS7971作为驱动芯片。BTS7971由一个p沟道的高边MOSFET和一个n沟道
的低边MOSFET结合一个集成的驱动IC,形成能经受大电流通过的H桥的半边。因此4个BTS7971便能进行连接构成两个H全
桥,进而实现电机的正反转。此外,使用 74HC244N三态八缓冲器隔离电机驱动模块,可防止电机转动产生的干扰信号灌入
主控芯片而致损坏。
采用常开型塑封干簧管作为检测元件。在道路的起点和终点处埋有磁铁,当小车经过磁铁时,干簧管闭合,进而将这种信
号传递给CPU,实现停车功能。将两个接近开关分别安装在小车两边对障碍进行检测。正常情况下,两个接近开关处于关闭
状态0。通过调整好接近开关的检测距离,当道路某一边的障碍物进入接近开关的检测范围后,接近开关一直保持导通状态
1,将这种信号的0和1变化传递到CPU,即可实现小车的障碍检测功能。
2 智能小车电磁寻线智能小车电磁寻线
2.1 传感器布置结构
采用“五横二竖加八字”排列的电磁线圈,如图2所示。此结构能使小车在直道、直角弯、S弯、十字弯,坡道上自主稳定地
寻线行驶,具有抗干扰性强、稳定性高、机械强度高等特点。在高速运行的情况下仍能保持稳定的导航功能。
下载后可阅读完整内容,剩余3页未读,立即下载
2020-10-19 上传
2024-02-27 上传
点击了解资源详情
2021-09-04 上传
2021-08-05 上传
2009-05-27 上传
2021-11-26 上传
2021-08-07 上传
点击了解资源详情

weixin_38590567
- 粉丝: 2
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
