ROS与Gazebo模拟:URDF和SDF教程解答
需积分: 1 194 浏览量
更新于2024-08-03
收藏 1.82MB PDF 举报
"HW04-urdf-gazebo-solns.pdf 是一份关于ROS (Robot Operating System) 中URDF( Unified Robot Description Format)和SDF(Simulation Description Format)在Gazebo仿真环境中使用的作业解答文件。作业目标是让学生了解URDF和SDF以及如何与gazebo和ros_control集成,并通过教程学习更复杂的模型和控制器。提交内容包括PDF文档,包含问题答案和截图,并按作业、姓名和ID命名文件。"
在ROS系统中,URDF是一种标准格式,用于描述机器人的结构、物理属性和关节信息。它使用XML语言,能够简洁地定义机器人的各个部分,如链接(links)和关节(joints),以及它们之间的关系。URDF允许开发者声明机器人的几何形状、惯量属性、限制和传感器等。
Gazebo是一个强大的开源3D仿真环境,常用于测试和验证ROS机器人应用程序。将URDF文件导入Gazebo,可以创建机器人的三维模型,并在虚拟环境中进行运动学和动力学模拟。作业中的"Using a URDF in Gazebo"教程指导学生如何将URDF文件整合到Gazebo中,以实现机器人模型的可视化和交互。
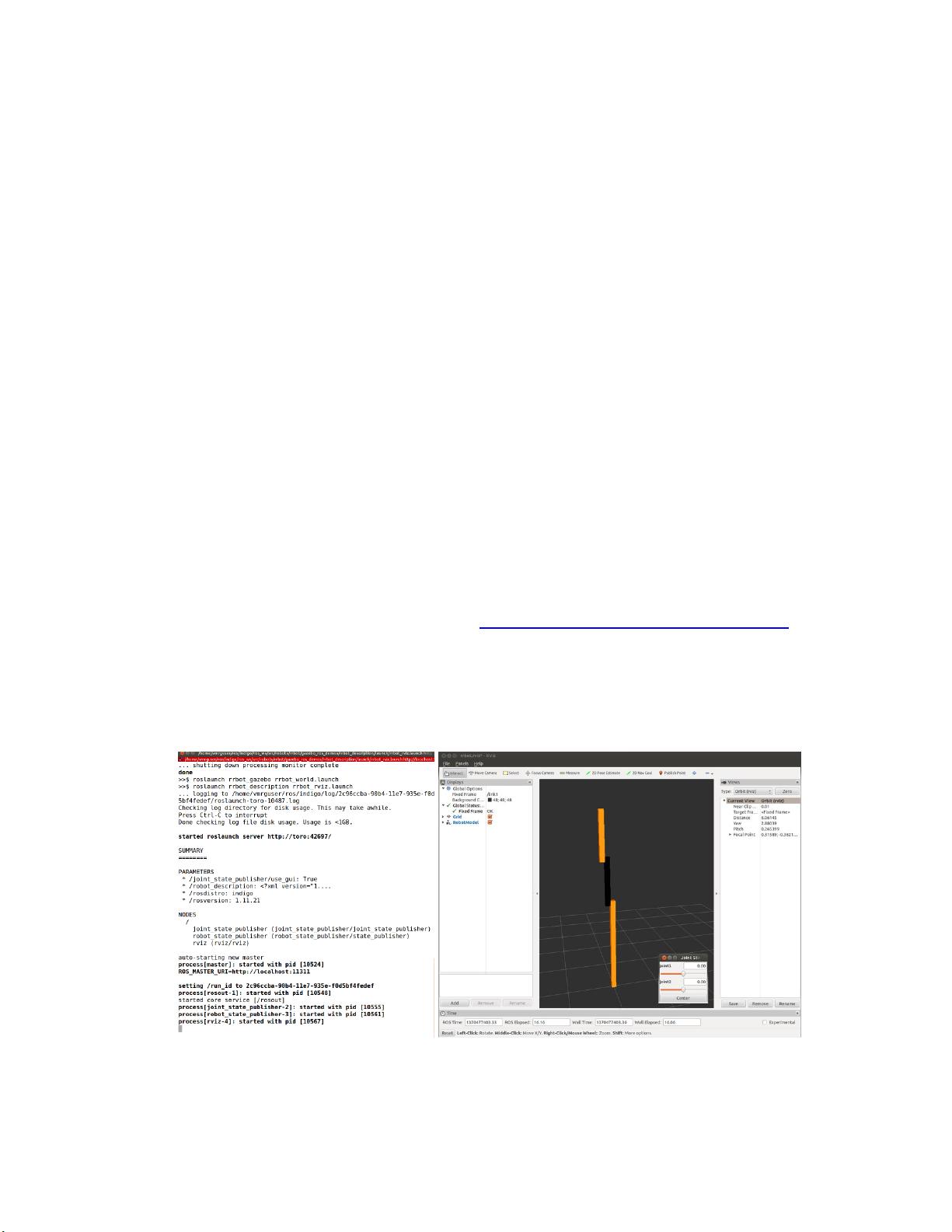
1. Viewing RRBot in RViz (1 point)
在这一部分,学生被要求展示终端(Terminal)和RViz(ROS的可视化工具)的截图。RViz能够显示由URDF描述的机器人模型,允许用户在3D空间中查看和操纵机器人。
2. What are Xacro files? (1 point)
Xacro是ROS中的一种XML宏语言,它的主要目的是简化和压缩URDF文件。通过使用Xacro,开发者可以定义宏,这些宏在编译时会扩展成复杂的URDF代码,使得代码更加模块化和易读。例如,一个机器人手部的复杂结构可以通过一个Xacro宏来定义,而不是在URDF文件中重复编写相同的几何形状和参数。
3. Viewing RRBots in Gazebo (继续未完部分)
在Gazebo中加载并查看RRBot,展示了如何使用ROS接口启动Gazebo仿真世界,并将机器人模型插入其中。这通常涉及到使用`roslaunch`命令启动一个包含Gazebo和机器人模型的launch文件。学生应能展示Gazebo窗口中机器人模型的截图,并解释如何控制和观察其行为。
4. ROS Middleware and ros_control (未直接提及但相关)
ROS Middleware是ROS的核心组成部分,负责节点间通信和数据传递。ros_control是ROS的一个包,提供了硬件抽象层和各种控制器接口,使得开发者能够轻松地为机器人设计控制策略,如PID控制器。在本作业中,学生可能需要实现或理解如何使用ros_control来控制在Gazebo中模拟的机器人。
这份作业涵盖了ROS中机器人建模、仿真和控制的基础知识,通过实践帮助学生掌握URDF、Xacro、Gazebo和ros_control的使用,为机器人软件开发打下坚实基础。
HW03 URDF 2 DoF
ROS Middleware
Deliverable
• The goals of this lab are to:
o Learn about sdf/urdf and how to integrate them with gazebo and ros_control.
o You will follow tutorials for more elaborate models and controllers.
• Deliverables:
o A PDF file, with answers and screen shots to all questions. Make sure you to include HW
Title, Name and ID, and Divide the document into the 3 sections that are part of this HW.
You will need to include both answers and screenshots in this pdf file.
o Submit your HW with the following name:
▪ How to name your file: HW03_ ID#.pdf
A. SDF and URDF in Gazebo using RRBot (9 points)
Follow the Gazebo tutorial: Using a URDF in Gazebo: http://gazebosim.org/tutorials?tut=ros_urdf
1. Viewing RRBot in RViz (1 point)
a. Show a screenshot of your terminal on the left and Rviz on the right.
Answer:
下载后可阅读完整内容,剩余7页未读,立即下载
2021-01-20 上传
2022-07-03 上传
2023-07-24 上传
2023-05-26 上传
2023-06-09 上传
2023-06-09 上传
2023-05-25 上传
2023-07-17 上传
2023-05-15 上传

xia夏小优
- 粉丝: 181
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- react_station:一个未来的React项目的工作空间
- awesome-tgcalls:精选的电报电话项目清单
- genesys:Genesys是与Visual Studio Code一起使用的原型工具包。 它使设计人员和UI开发人员可以快速创建低保真至高保真原型,甚至是可用于生产的UI。 Genesys为大多数主要设计系统提供支持
- 杭州地区天气预报易语言源码例程.zip易语言项目例子源码下载
- DSI-Modificacion-Practica7
- 生活服务网站模版
- 青春海洋全站程序
- Web
- recipes-gatsby
- 汉字转换拼音.zip易语言项目例子源码下载
- Keystroke-开源
- woocommerce-export-customer-email:WooCommerce 商店从管理面板导出客户账单电子邮件的基本功能
- MacroTracker
- 岳家楼住宅小区8号楼钢筋工程施工方案.zip
- information-management-system
- 实用的IP转向程序
