飞思卡尔智能车直立控制方案
下载需积分: 10 | PDF格式 | 4.05MB |
更新于2024-07-23
| 138 浏览量 | 举报
"飞思卡尔智能车直立车控制方案,包括平衡控制、速度控制、方向控制等,适用于第七届全国大学生‘飞思卡尔’杯智能汽车竞赛电磁组直立行车。"
飞思卡尔直立方案是针对飞思卡尔智能车竞赛中直立行车的一项综合技术解决方案,它涉及到车辆的平衡控制、速度控制以及方向控制等多个关键领域。该方案适用于电磁组比赛,并且经过实际测试,证明是可行的。
在平衡控制部分,方案首先将直立行走任务分解,然后利用车辆模型的直立控制系统来保持车辆稳定。通过测量车辆的角度和角速度,结合速度控制,确保车辆在行驶过程中能够维持直立状态。这通常需要一个精密的传感器系统,例如倾角传感器和角速度传感器,以实时监测车辆的姿态变化。
速度控制是通过调整电机的转速来实现的,这需要对电机的工作特性有深入理解。例如,电机在不同电压下的速度变化曲线可以作为控制策略的基础。此外,加速度传感器如MMA7260用于检测车辆运动时的加速度变化,这些数据有助于精确计算车辆的即时状态。
方向控制则依赖于对车模的精确转向,这可能涉及到电磁线检测电路,以识别赛道路径。通过角度计算电路,结合角速度信息,可以计算出车辆的方向偏差并进行修正。
电路设计方面,方案涵盖了整体电路框图,包括DSC(数字信号控制器)介绍及其最小系统、倾角传感器电路、电机驱动电路、速度传感器电路、电磁线检测电路和角度计算电路。每个部分都详细阐述了其工作原理和设计要点。
机械设计部分讨论了如何简化车模结构,优化传感器的安装位置,以及在调试过程中需要注意的问题。
软件开发环节,方案描述了软件的功能框架、DSC的硬件资源配置,以及主要算法的实现。调试部分则提供了静态和动态参数的调试方法,以及如何根据比赛环境和车模性能进行方案改进,以提升整体表现。
飞思卡尔直立方案是一个涉及硬件设计、软件编程和系统集成的综合性工程,旨在帮助参赛队伍在智能汽车竞赛中实现稳定、快速且精准的直立行驶。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
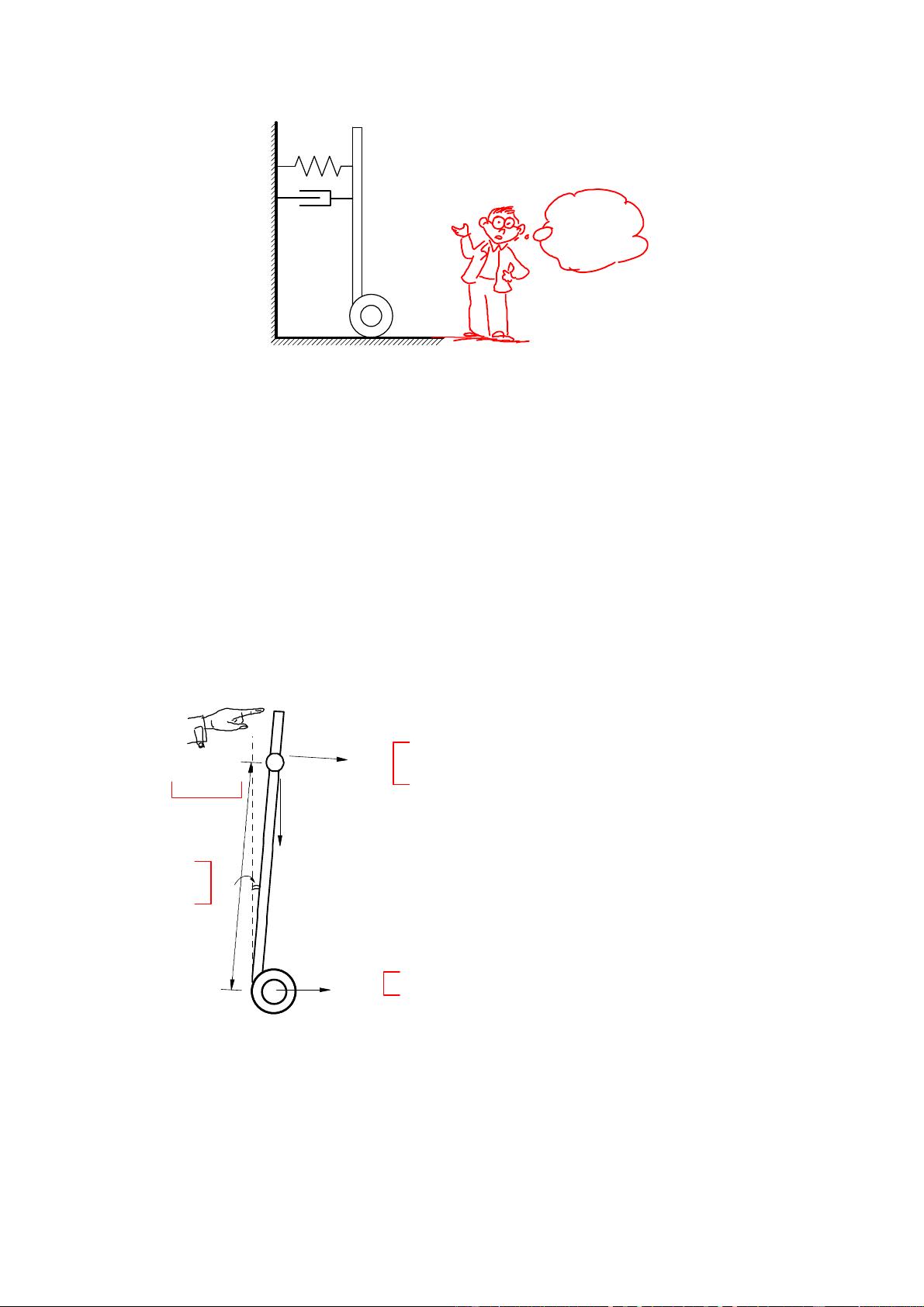
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
mg
θ
()
() () ()
2
2
d
d
t
LgtatLxt
t
θ
θ
=−+
()
xt
L
()
at
重心高度
外力引起的
角加速度
车轮运动加速度
车模
倾角
车模运动方程
()
() () () ()
2
2
d
sin cos
d
t
LgtattLxt
t
θ
θθ
=− +⎡⎤ ⎡⎤
⎣⎦ ⎣⎦
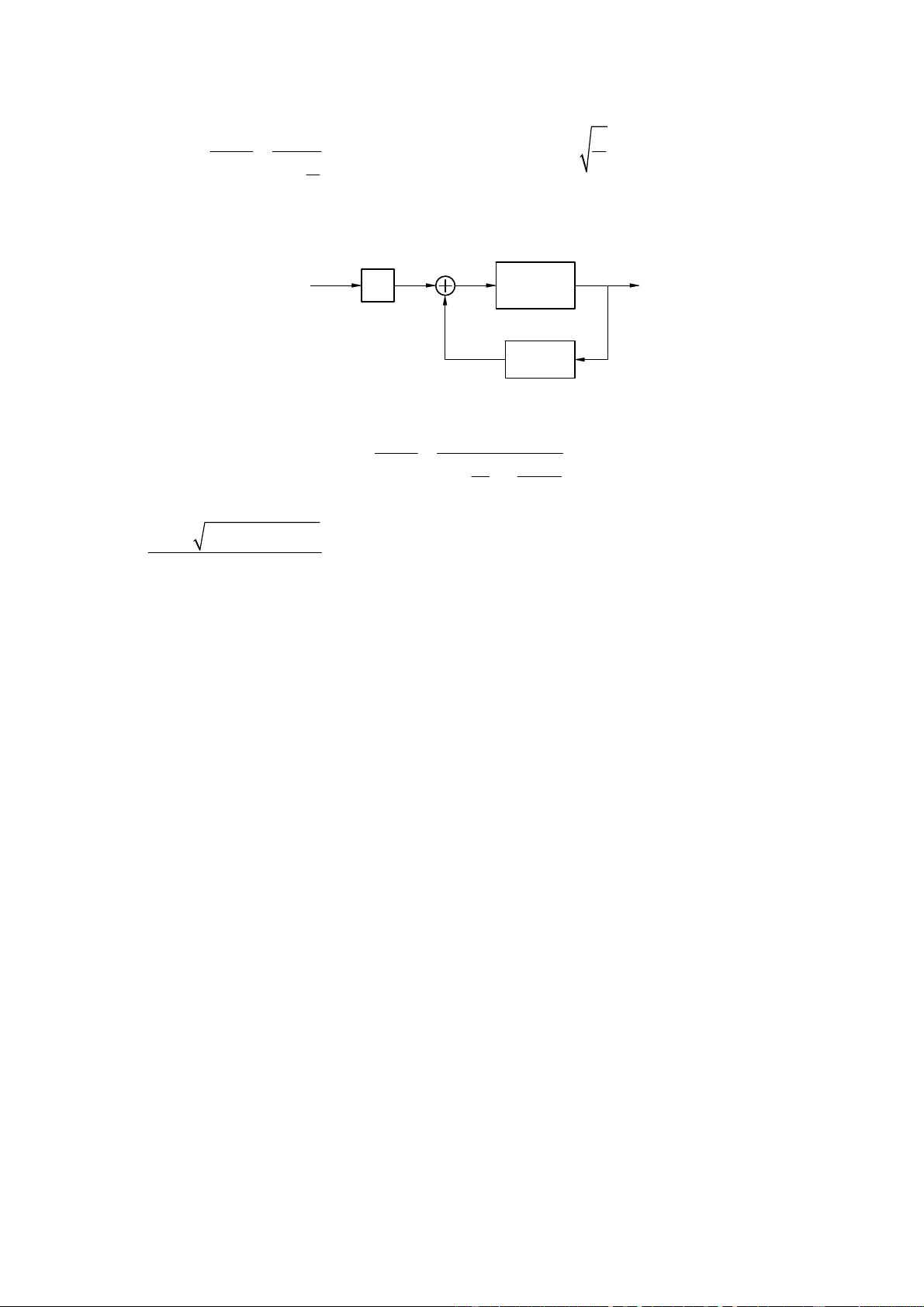
在角度θ很小时,运动方程简化为:
车模静止时:
()
0at =
()
() ()
2
2
d
d
t
LgtLxt
t
θ
θ
=+
图 2‐11 车模运动方程
对应车模静止时,系统输入输出的传递函数为:
16



剩余107页未读,继续阅读
相关推荐




u014178773
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- jdk-7u80-windows-x64.exe
- CRM成功的十大秘诀DOC
- InsectDefense
- ProClub:2015-2016年霍姆斯特德高中编程俱乐部工作坊资料
- cryptmount:Linux加密文件系统管理工具-开源
- Zadania-Informatyka
- cards_test_task
- 三菱PLC通过三菱控件与PC交互
- 留住客户还不够
- tv-remote-control:在浏览器上运行的电视遥控模拟器
- python-utils:在Keboola Connection环境中运行的Python应用程序的实用程序库
- 数据库世界:CS340网站数据库
- cpu环境下可运行的骨骼序列行为识别的代码
- IFCX-开源
- st-tutorial.github.io
- DeliveryTracker:大韩民国的快递服务跟踪器写在Rust中
