

Application Note
R01AN6027EJ0100 Rev.1.0 Page
1
of 66
May 10, 2018
RH850 Series
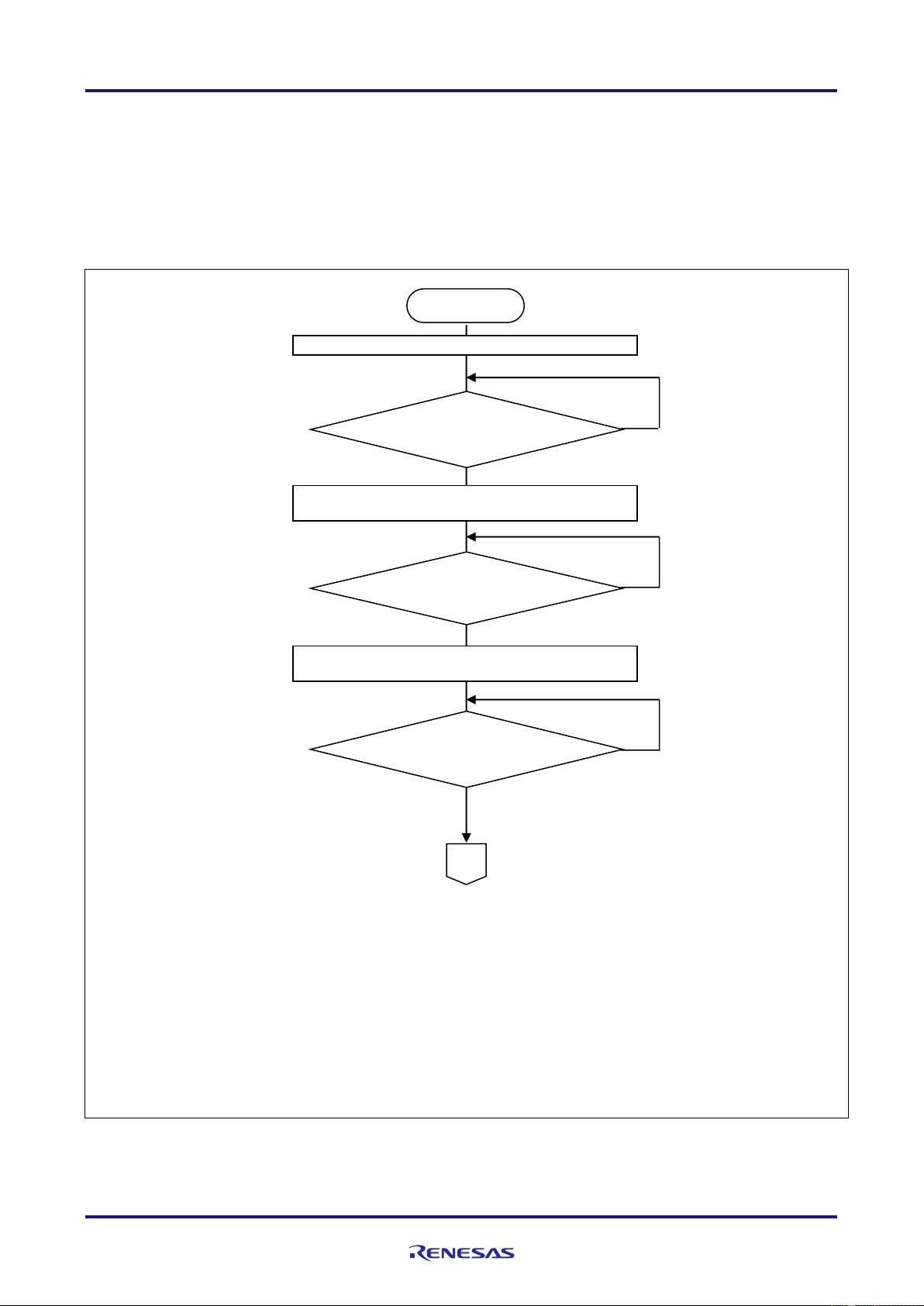
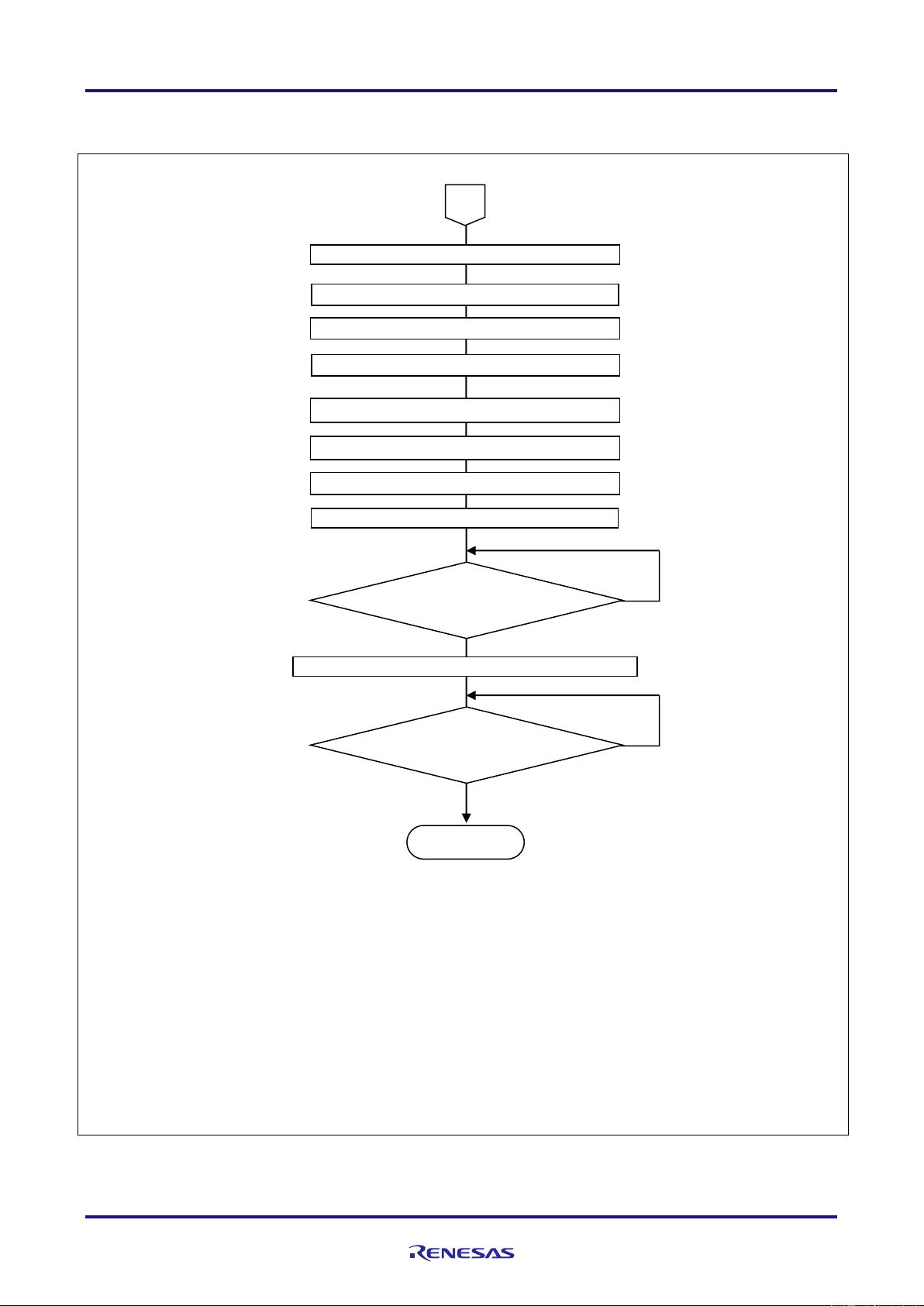
CAN Configuration(CAN FD Mode)
Summary
This document describes an example of a procedure for setting CAN Configuration using the RH850 series. Please
refer to the notes in the latest user's manual hardware edition for the settings of each register.
Operation Confirmed Devices
This document applies to the RH850 series.
The variables described in the text are as follows.
Table 1-1 Target Devices and Variables
Variable
Target MCU
RH850/E2x
RH850/E1M-S2
RH850/P1M-E
RS-CAN FD channel number
m
0~4
0~3
0~2
GAFLIDj, GAFLMj, GAFLP0j,
GAFLP1j Register numbers
j
0~15
0~15
0~15
Transmit/Receive FIFO buffer
number
k
0~14
0~11
0~8
Receive FIFO buffer number
x
0~7
0~7
0~7
Receive buffer number
q
0~79
0~63
0~47
Transmit buffer number
p
0~79
0~63
0~47
RAM test number
r
0~63
0~63
0~63
GAFLCFGi、GTINTSTSi
register number
i
0
0
0
Number of each status register
y
0~2
0,1
0,1
The functions marked with "★" in the text are applicable to cases where 2 or more channels are installed.
In the text, CFD is omitted from the register names.
R01AN6027EJ0100
Rev.1.0


剩余68页未读,继续阅读

不吃鱼的猫丿
- 粉丝: 638
- 资源: 8
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- BSC绩效考核指标汇总 (2).docx
- BSC资料.pdf
- BSC绩效考核指标汇总 (3).pdf
- C5000W常见问题解决方案.docx
- BSC概念 (2).pdf
- ESP8266智能家居.docx
- ESP8266智能家居.pdf
- BSC概念 HR猫猫.docx
- C5000W常见问题解决方案.pdf
- BSC模板:关键绩效指标示例(财务、客户、内部运营、学习成长四个方面).docx
- BSC概念.docx
- BSC模板:关键绩效指标示例(财务、客户、内部运营、学习成长四个方面).pdf
- BSC概念.pdf
- 各种智能算法的总结汇总.docx
- BSC概念 HR猫猫.pdf
- bsc概念hr猫猫.pdf
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


