UR5机械臂的Qt TCP/IP远程控制与功能扩展
需积分: 5 186 浏览量
更新于2024-08-03
收藏 455KB DOC 举报
UR5机械臂的TCP/IP控制是一种先进的远程操作技术,它允许用户通过计算机与UR5机械臂进行通信,替代传统的实物示教器进行编程和控制。UR5机械臂原本依赖于专用的示教器进行操作,这种方式在实际应用中可能存在不便,特别是在需要频繁更改程序或进行远程监控时。
作者决定利用Qt,一种强大的跨平台应用程序开发框架,来创建一个控制软件,以便实现无线网络下的远程控制。通过Qt的开发,作者不仅成功地将示教器的控制界面移植到了电脑上,而且还对其进行了功能扩展,包括添加了调试功能,如输入输出对话框用于数据的发送和接收,以及程序编辑功能,用户可以组合不同的指令来实现复杂的控制任务。
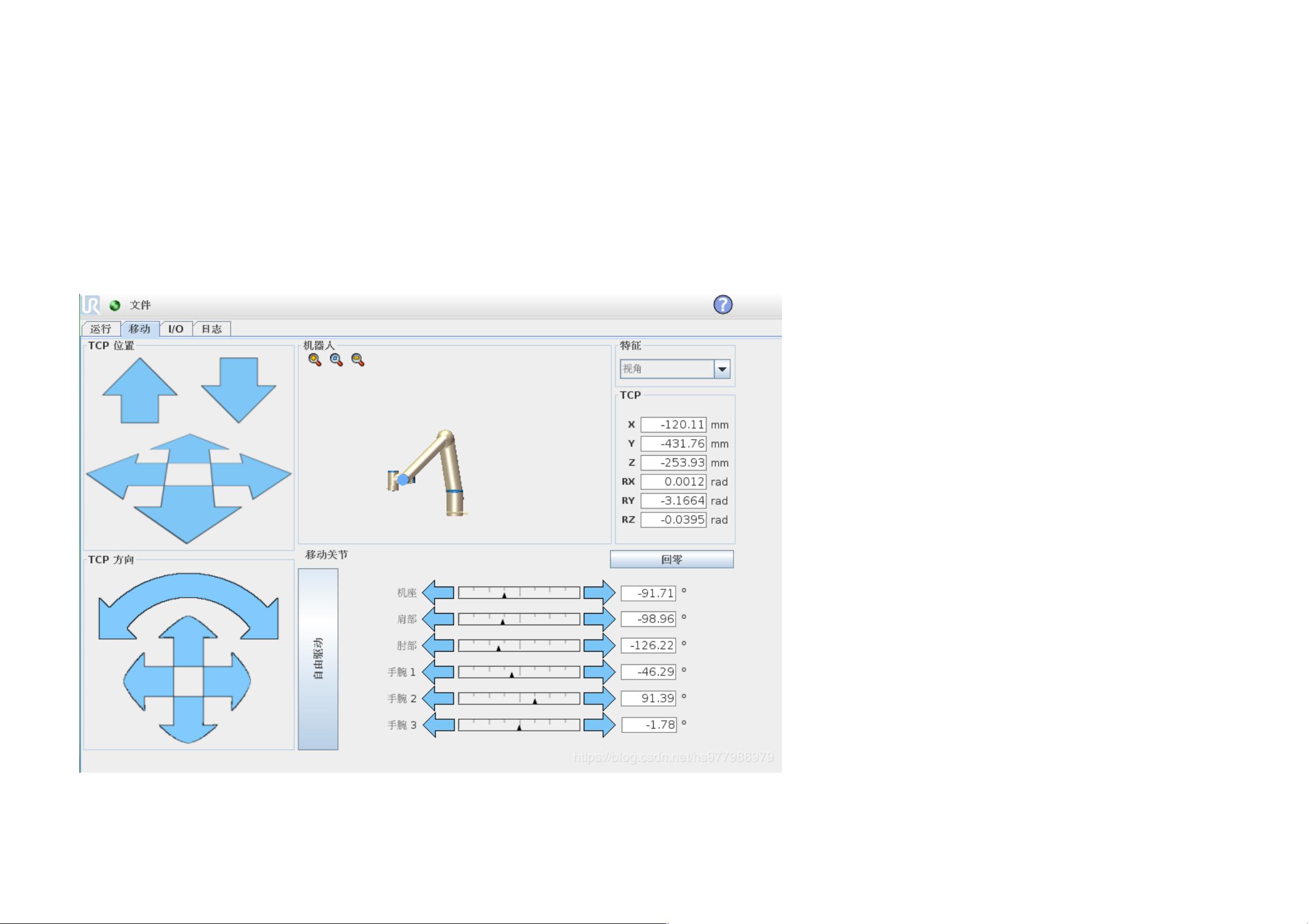
软件的控制区域设计得直观易用,包含了电源控制、制动解除、示教模式切换、保护停止解除等功能,使用户能够快速而灵活地对机械臂进行操作。进度条则允许用户调整运动速度和加速度,以满足精确的操作需求。此外,机器人状态区域实时显示关节角度、电压、电流等关键参数,帮助用户了解机械臂的工作状态。
值得注意的是,IP设置区域允许用户设置并验证机械臂的网络连接,确保通信的稳定性和可靠性。程序编辑区域通过文件操作功能,方便用户存储和调用自定义的控制脚本。控制按钮区域模拟了示教器的操作方式,提供了一致的用户体验。
当机械臂遇到保护性停止或断电等异常情况时,软件会给出明确的报警提示,并提供解除机制,以保障系统的安全性。这个UR5机械臂的TCP/IP控制软件是一个实用且高效的工具,极大地提升了机械臂操作的便捷性和灵活性。
下载后可阅读完整内容,剩余6页未读,立即下载
2024-04-22 上传
2022-08-08 上传
422 浏览量
2023-09-17 上传
2023-09-18 上传
2023-08-14 上传
2023-05-19 上传
2023-05-05 上传
2023-05-05 上传

qinfen123456
- 粉丝: 7
- 资源: 29
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
