MATLAB实现控制系统仿真:模型转换与稳定性分析
需积分: 20 197 浏览量
更新于2024-07-17
收藏 676KB PDF 举报
MATLAB是一种强大的数值计算和可视化工具,在控制系统的仿真分析中发挥着关键作用。本文将深入探讨如何在MATLAB环境中进行控制系统的设计和分析。
首先,我们关注控制系统模型的构建。传递函数是描述动态系统行为的一种常用数学工具,通过输入与输出之间的关系来表达。在MATLAB中,我们使用`s=tf('s')`创建复数频率变量`s`,然后定义传递函数`G=(s^3+4*s+2)/(s^3*(s^2+2)*((s^2+1)^3+2*s+5))`。这个例子中,`G`是一个三阶多项式除以一个六阶多项式,代表了一个典型的控制系统。接下来,我们通过`conv`函数和`tf`函数构造另一个传递函数`H`,它是一个二阶Z变换模型,用于模拟系统的频率响应。
零极点模型则是另一种表示系统特性的方法。通过`z=[-1-j-1+j]; p=[0 0 -5 -6 -j j]; G=zpk(z,p,8)`,我们创建了一个具有八个极点和两个零点的系统模型。`pzmap(G)`函数用于绘制系统零点和极点的位置,有助于直观理解系统的稳定性。对于另一个模型`H`,我们定义了零点、极点和采样时间,通过`pzmap(H)`检查其特性。
线性系统分析是MATLAB应用的关键部分。在这里,我们需要评估传递函数`G`的稳定性。传递函数的稳定性取决于极点分布在复平面上的位置:如果所有极点都在左半平面(实部小于0),则系统是稳定的。具体到`G`的稳定性,需要查看其极点分布图,判断是否存在右半平面的极点。
在MATLAB中,可以通过`pole(G)`函数直接获取极点,然后结合根轨迹分析、Nyquist图等工具来确认稳定性。此外,对于多输入多输出(MIMO)系统,可能还需要进行更复杂的稳定性分析,例如通过分块矩阵法或系统矩阵特征值的实部分析。
总结来说,本文提供了MATLAB在控制系统仿真中的基础操作实践,包括传递函数和零极点模型的创建、绘制和分析,以及如何通过这些模型来判断线性系统的稳定性。这些技能对于控制系统的工程师来说至关重要,能够帮助他们设计、分析和优化实际控制系统。
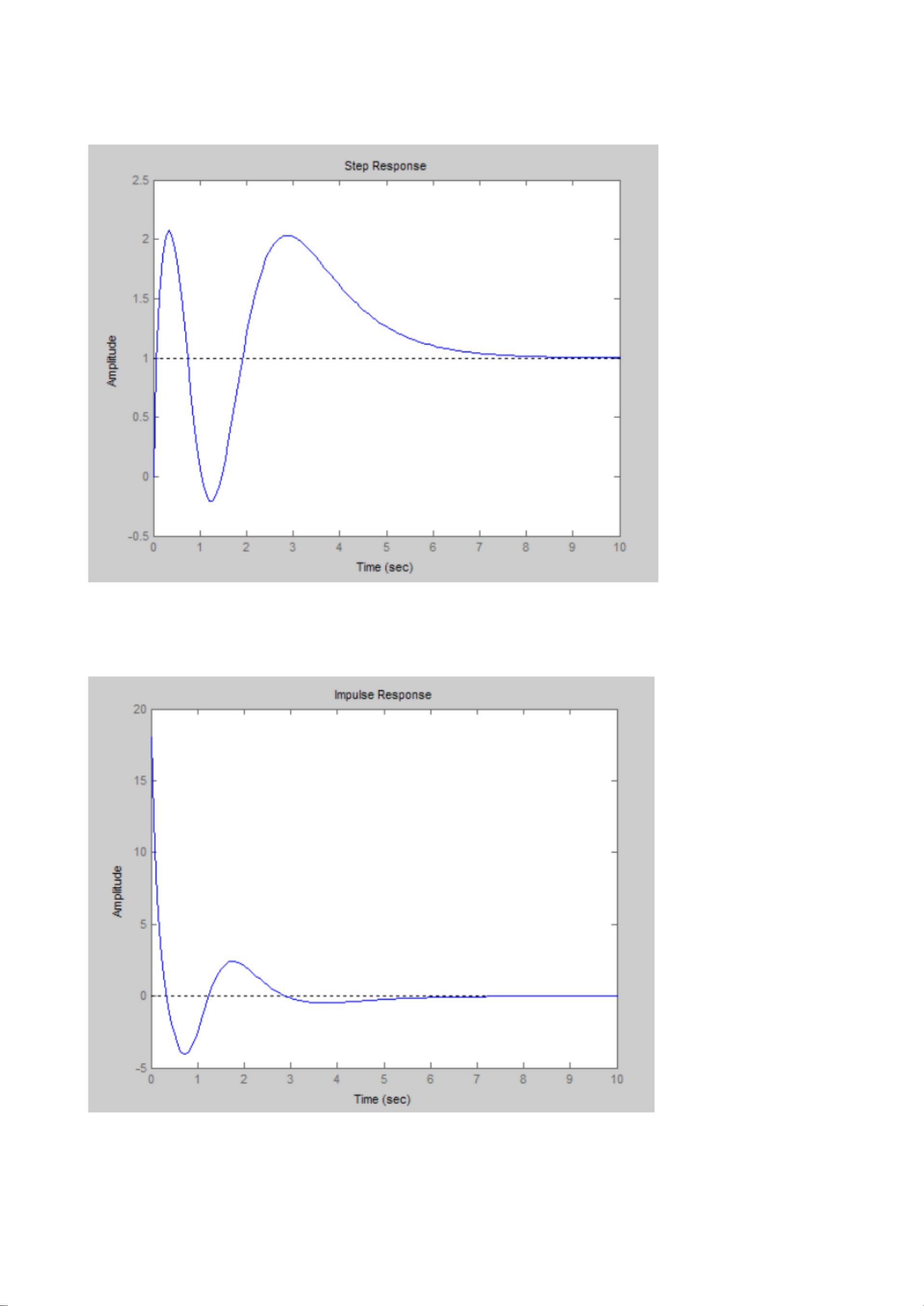
单位脉冲响应:
三、 线性系统 Simulink 仿真应用
剩余23页未读,继续阅读
171 浏览量
943 浏览量
204 浏览量
313 浏览量
417 浏览量
995 浏览量
375 浏览量

山东大汉1
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- DICOM标准与医学影像通讯系统PACS研究
- Jboss EJB3.0 实例教程:从入门到精通
- JavaScript表单验证实例集锦
- Struts框架详解与标签库速查
- Oracle9i查询优化技术详解
- DWR中文教程:入门与实践
- C语言标准详解:x86/GNU/Linux版
- Herbinate示例:查询、分页与更新操作详解
- C#入门教程:从零开始学习
- 北京天路物流网站建设:信息平台与功能详解
- 大型制造企业网站构建与安全策略
- 旅行社网站建设策略:打造特色旅游平台
- DM9000E:集成Fast Ethernet MAC控制器与10/100 PHY的低成本解决方案
- IBM CICS系统管理与应用开发实战指南
- 主机面试必备:主流主机系统与优势解析
- Hibernate开发入门与实战指南
