PIXKIT-ROS开发指南:从入门到Autoware修改
"ROS开发指导手册 全中文"
ROS(机器人操作系统)是一个强大的开源框架,专为机器人设备和软件设计,提供了硬件抽象、设备控制、任务调度、消息传递和包管理等核心功能。它允许开发者通过ROS节点和话题进行模块化编程,实现不同组件之间的通信。ROS还包含了获取、编译和跨平台运行代码的工具。
1. ROS简介
- catkin是ROS的官方构建系统,它基于CMake,并扩展了rosbuild的功能,提供更好的包管理和跨编译支持。工作空间是catkin的核心概念,它是一个包含多个ROS程序包的目录结构。创建ROS工作空间的基本步骤包括创建文件夹、进入工作空间、编译以及source环境设置文件。
2. 工作空间和程序包
- 工作空间是ROS项目组织的基本单元,通常在用户家目录下的`catkin_ws`中。工作空间的`src`子目录用于存放程序包,而`devel`和`build`目录则分别存储编译后的头文件和可执行文件。
- 程序包是ROS中的基本代码单位,它们包含源代码、消息定义、服务和参数等,通过`catkin_make`或`catkin_build`进行编译。
3. ROS节点和话题
- ROS节点是运行在独立进程中,执行特定任务的代码单元。节点之间通过发布和订阅话题来交换数据。
- ROS话题是节点间通信的通道,节点可以发布消息到一个话题,其他节点则可以订阅该话题,接收消息。
- 创建自定义消息涉及到定义消息类型,然后编写发布节点(负责发布消息)和订阅节点(处理接收到的消息)。
4. 修改项目源码
- 项目源码的修改可能涉及添加数据模型、代码移植和编译测试。在了解项目结构后,开发者可以按需修改代码以适应特定需求。
- 添加数据模型可能意味着定义新的ROS消息类型或服务,以满足新的数据传输需求。
- 代码移植涉及到将已有代码适配到ROS环境中,确保它们能正确与其他ROS组件交互。
5. 修改Autoware源码
- Autoware是一个开放源码的自动驾驶平台,包含多种感知、规划和控制算法。如果需要对其进行定制,需要理解其代码结构,找到相应的模块进行修改。
- 修改指定部分代码后,需要重新编译Autoware并进行测试,确保修改不影响其他功能且能达到预期效果。
6. 帮助
- 教程通常会提供详细的步骤和解释,帮助开发者快速上手ROS和Autoware,从基础概念到实际项目开发,逐步深入。
对于初学者,了解ROS的基本概念和工作流程至关重要,这包括理解工作空间、程序包、节点和话题。而对于有经验的开发者,快速掌握Autoware的架构和源码修改方法,能帮助他们在无人驾驶领域进行定制化开发。ROS开发指导手册是线控底盘以及更广泛的无人驾驶领域的宝贵资源,提供了全面的实践指南。
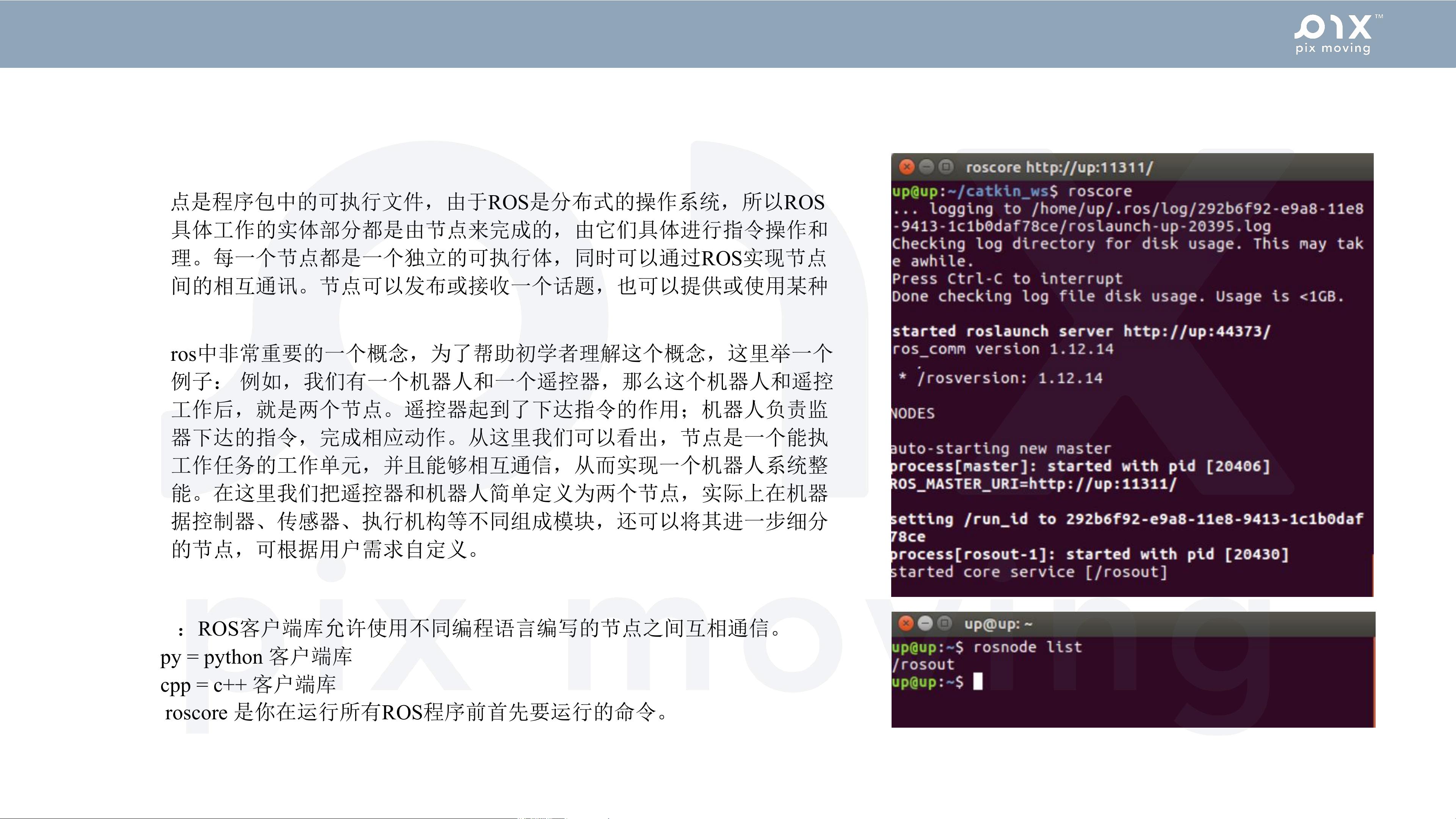
Ø ROS节点是程序包中的可执行文件,由于ROS是分布式的操作系统,所以ROS
下真正具体工作的实体部分都是由节点来完成的,由它们具体进行指令操作和
数据处理。每一个节点都是一个独立的可执行体,同时可以通过ROS实现节点
与节点间的相互通讯。节点可以发布或接收一个话题,也可以提供或使用某种
服务。
Ø 节点是ros中非常重要的一个概念,为了帮助初学者理解这个概念,这里举一个
通俗的例子: 例如,我们有一个机器人和一个遥控器,那么这个机器人和遥控
器开始工作后,就是两个节点。遥控器起到了下达指令的作用;机器人负责监
听遥控器下达的指令,完成相应动作。从这里我们可以看出,节点是一个能执
行特定工作任务的工作单元,并且能够相互通信,从而实现一个机器人系统整
体的功能。在这里我们把遥控器和机器人简单定义为两个节点,实际上在机器
人中根据控制器、传感器、执行机构等不同组成模块,还可以将其进一步细分
为更多的节点,可根据用户需求自定义。
>客户端库:ROS客户端库允许使用不同编程语言编写的节点之间互相通信。
rospy = python 客户端库
roscpp = c++ 客户端库
>roscore: roscore 是你在运行所有ROS程序前首先要运行的命令。
>查看当前活跃的节点:
$ rosnode list
3. 理解 ROS 节点和话题
3.1 什么是 ROS 节点
PIXKIT - ROS开发指导手册
剩余28页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-17 上传
2008-12-26 上传
2018-12-01 上传

汽车电子爱好者
- 粉丝: 3
- 资源: 31
 我的内容管理
展开
我的内容管理
展开







