摄像机自标定新方法:基于矩形几何特性
6 浏览量
更新于2024-08-28
1
收藏 6.88MB PDF 举报
"基于矩形的摄像机自标定几何方法"
在计算机视觉和图像处理领域,摄像机自标定是一项重要的技术,它允许我们确定摄像机的内在和外在参数,以便进行精确的三维重建和物体定位。本文介绍了一种新颖的几何方法,该方法特别依赖于矩形的特性来进行摄像机的自标定。这种方法的优势在于只需要同一个矩形的两次或三次成像,就能在已知或未知传感器特性的条件下,标定摄像机的内参数并识别矩形的长宽比。
首先,该方法利用了矩形两组对边的消隐点特性,这些消隐点是由于三维空间中的平行线在二维图像上交汇而形成的。此外,矩形的长宽比信息是隐含在它的几何形状中的,这为标定提供了额外的约束。通过这些特性,可以建立关于摄像机内参数的约束方程。
进一步地,该方法利用了空间中有限距离点与同一无穷远点连线的平行性,以及完全四边形(四个顶点共圆的四边形)的调和分割特性。完全四边形的性质在解决几何问题时非常有用,因为它能帮助确定线段的比例关系。在多次成像的矩形中,长宽比保持不变,这一特点使得标定过程更加稳定。
为了提高标定的精度,作者提出了一种结合畸变参数优化和线性内参数标定的迭代方法。通过构建与直线段成像相关的代价函数,可以有效地校正图像畸变,从而达到接近无畸变情况下的标定精度。在已知矩形任意两个顶点坐标的情况下,可以解出摄像机的所有外参数,如旋转和平移。
实验结果表明,该标定算法具有快速的收敛速度,并且对图像噪声具有良好的鲁棒性。与传统的平面靶标法相比,该方法减少了对预知条件的依赖,同时提升了标定的精度和效率。实际应用中,这种方法尤其适用于那些难以获取标准标靶或者需要高精度实时标定的场景。
这篇研究提供了一种创新的、基于几何特性的摄像机自标定方法,它简化了标定过程,提高了标定的准确性和实用性,对于图像处理和机器视觉领域的实践应用具有重要的价值。
徐
嵩等:
基于矩形的摄像机自标定几何方法
同 时,由 (
1
)式 可 引 出 无 穷 单 应 关 系,即 当
狆
w
为无穷远点[
狆
w
=
(
狓
w
,
狔
w
,
狕
w
,
0
)
T
]时可得:
狊
狆
u
=
犃 犚
[ ]
犜 狓
w
,
狔
w
,
狕
w
,
[ ]
0
T
=
犃犚 狓
w
,
狔
w
,
狕
[ ]
w
T
,
(
5
)
并记,无穷远单应矩阵:
犎
!
=
犃犚
。
2.2
摄像机非线性畸变模型
2.2.1
摄像机畸变校正模型
在虚拟成像坐 标 系
犗
n
狓
n
狔
n
(
犳
n
=
1
)中 定 义 畸
变校正模 型 和参 数 [(
6
)式]。该模 型 将 易 于 处 理 当
λ
≠
1
时的情况,同时有 利 于采 用 非线 性 优 化 方 法
求解畸变参数。
狌
[ ]
狏
=
1
+
∑
狇
狋
d
=
1
犽
狋
d
狉
2
犻
( )
dn
(
狌
d
-
狌
0
)
(
狏
d
-
狏
0
[ ]
)
+
狌
0
狏
[ ]
0
狉
dn
=
狓
2
dn
+
狔
2
槡
dn
狓
dn
狔
[ ]
dn
=
犳
狀
/
犳
狓
0
0
犳
狀
/
犳
[ ]
狔
(
狌
犱
-
狌
0
)
(
狏
犱
-
狏
0
[ ]
烅
烄
烆
烅
烄
烆
)
,(
6
)
(
6
)式中,
狆
u
=
(
狌
,
狏
,
1
)
T
为畸变校正后的图像坐标,
狆
d
=
(
狌
d
,
狏
d
,
1
)
T
为 考 虑 畸 变 时 的 图 像 坐 标。
犽
狋
d
为
第
狋
d
阶径向畸变系数,一般取
狇
≤
2
。
2.2.2
摄像机畸变仿真模型
为实现对 自标定 算法中 的畸变 校正的 验证,设
计与
2.2.1
节相对应的畸变仿真 模型。求得图 像点
(
狌
,
狏
)在 虚 拟 成 像 坐 标 系 中 相 对 中 心
犗
n
的 位 置
(
狓
n
,
狔
n
)和距离
狉
n
:
狉
2
n
=
狓
2
n
+
狔
2
n
,
狉
dn
(
0
)
=
狉
n
狓
n
狔
[ ]
n
=
犳
n
/
犳
狓
0
0
犳
n
/
犳
[ ]
狔
狌
-
狌
0
狏
-
狏
[ ]
烅
烄
烆
0
, (
7
)
以
狉
nd
(
0
)
为 初 值,迭 代 求 解 畸 变 后 成 像 点 在
犗
n
狓
n
狔
n
与
犗
n
间的距离
狉
nd
(
犿
)
,取
犿
=
15
。
狉
nd
(
犻
)
=
狉
n
1
+
∑
狇
狋
d
=
1
犽
狋
d
狉
2
狋
d
nd
(
犻
-
1
[ ]
)
-
1
,
(
犻
=
1
,
2
,…,
犿
),
(
8
)
由比例关系和(
7
)式得到畸变后的成像点:
狌
d
狏
[ ]
d
=
狉
nd
(
犿
)
狉
n
狌
-
狌
0
狏
-
狏
[ ]
0
+
狌
0
狏
[ ]
0
, (
9
)
综合
2.1
节、
2.2.2
节,将摄像机成像过程简记为
狆
u
=
犉
ima
g
e
犮
u
,
犳
u
,
[ ]
犽
,
犚
,
[ ]
犜
,
狆
( )
w
, (
10
)
式 中
犮
u
=
狌
0
狏
[ ]
0
T
,
犳
u
=
犳
狓
,
犳
[ ]
狔
,
犽
=
犽
1
,…,
犽
[ ]
狇
。
3
标定原理
3.1
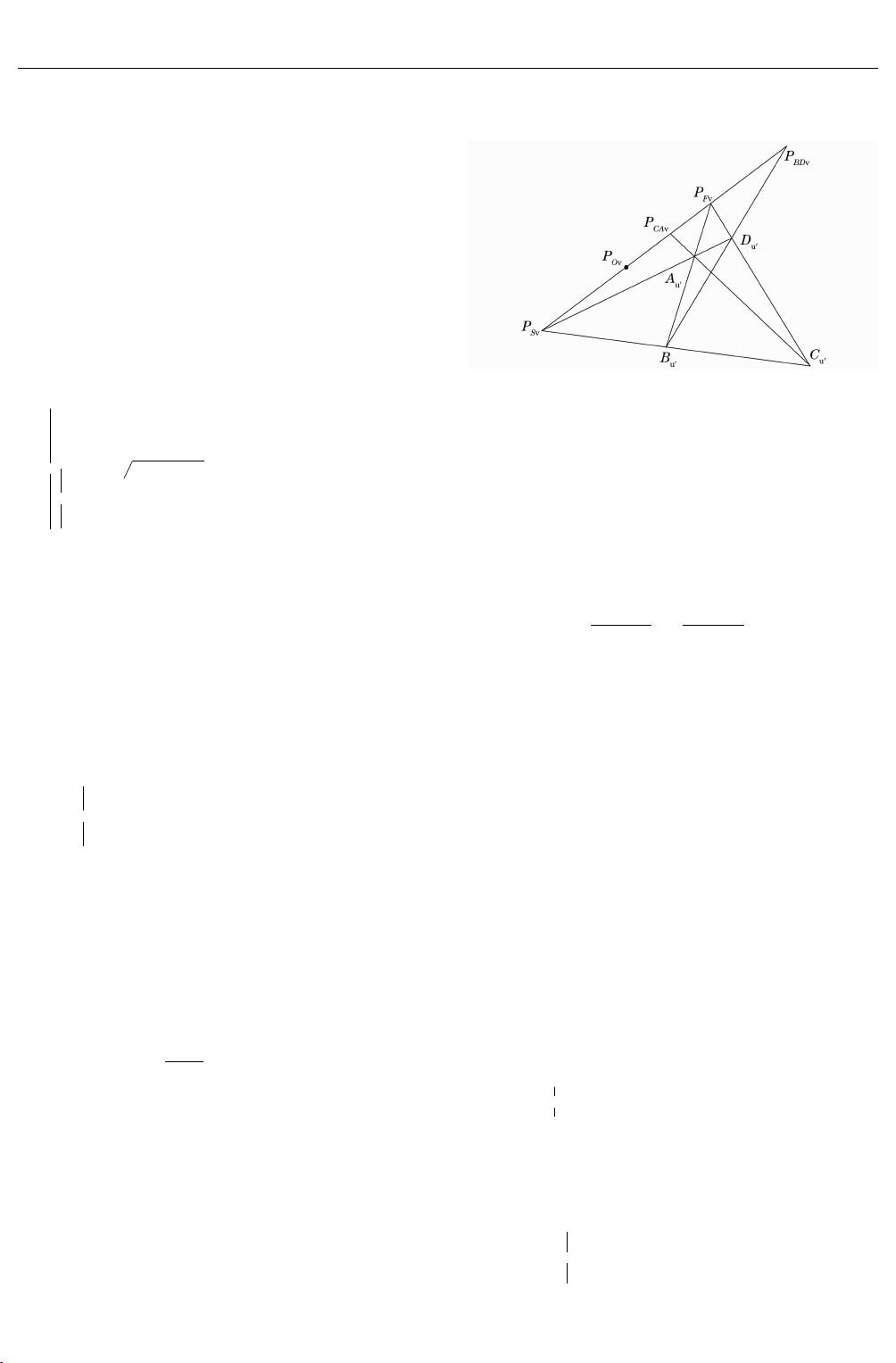
矩形成像的平面几何特性
矩形的 四 个 顶 点 (
犃
、
犅
、
犆
、
犇
)成 像 后 能 对 应
犗
u
狌狏′
中的(
犃
u
′
,
犅
u
′
,
犆
u
′
,
犇
u
′
),并构成图
2
所示的完
全四边形
犃
u
′
,
犅
u
′
,
犆
u
′
,
犇
u
′
犘
犉
v
犘
犛
v
。
图
2
矩形成像点几何关系
Fi
g
.2 Geometr
y
relationofrectan
g
leima
g
e
p
oints
引理
1
:完 全 四 边 形 调 和 分 割 特 性 (证 明 见 文 献
[
20
])
如图
2
,
犃
u
′
犅
u
′
犆
u
′
犇
u
′
,
犃
u
′
犅
u
′
与
犆
u
′
犇
u
′
交于
犘
犉
v
,
犃
u
′
犇
u
′
与
犅
u
′
犆
u
′
交 于
犘
犛
v
,
犃
u
′
犆
u
′
和
犅
u
′
犇
u
′
分 别 与
犘
犉
v
犘
犛
v
交于
犘
犆犃
v
和
犘
犅犇
v
。则
犘
犉
v
犘
犛
v
被
犘
犆犃
v
和
犘
犅犇
v
调和分割,即:
犘
犛
v
犘
犆犃
v
犘
犛
v
犘
犅犇
v
=
犘
犉
v
犘
犆犃
v
犘
犉
v
犘
犅犇
v
.
(
11
)
定理
1
:完全四边形中的反演点对
如图
2
,以
犘
犉
v
犘
犛
v
为直径并以其中点
犘
犗
v
为圆
心的圆
犗
犘狅
v
,则
犘
犆犃
v
和
犘
犅犇
v
关于
犗
犘狅
v
互为反演点,
即:
犘
犗
v
犘
犆犃
v
·
犘
犗
v
犘
犅犇
v
=
(
犘
犗
v
犘
犉
v
)
2
, (
12
)
证明:由(
11
)式,并记:
犚
犘犗
v
=
犘
犗
v
犘
犉
v
,可得:
犘
犛
v
犘
犆犃
v
·
犘
犉
v
犘
犅犇
v
=
犘
犉
v
犘
犆犃
v
·
犘
犛
v
犘
犅犇
v
(
犚
犘犗
v
+
犘
犗
v
犘
犆犃
v
)
·
(
犘
犗
v
犘
犅犇
v
-
犚
犘犗
v
)
=
(
犚
犘犗
v
-
犘
犗
v
犘
犆犃
v
)
·
(
犘
犗
v
犘
犅犇
v
+
犚
犘犗
v
)
犚
2
犘犗
v
=
犘
犗
v
犘
犆犃
v
·
犘
犗
v
犘
犅犇
v
.
(
13
)
3.2
单次成像的摄像机光心约束
由于在欧几里得空间中,若干有限距离点[设为
犘
犉犻
(
犻
=
1
,…,
犖
)]与同一 无穷 远点(
犘
v
)的 连线 相
互平行
[
21
]
,[
犘
犉犻
犘
v
‖
犘
犉犽
犘
v
(
犻
≠
犽
)]。
因而,如图
3
可得:
犗
c
犘
犛
v
‖
犅犆
,
犗
c
犘
犉
v
‖
犃犅
犗
c
犘
犆犃
v
‖
犆犃
,
犗
c
犘
犅犇
v
‖
烅
烄
烆
犅犇
.
(
14
)
对图
3
中通过光心与无穷远直线的平面上的信
息进行解 算 可 以 得 到 光 心
犗
c
所 在 的 圆
犆
犗
c
。 由 平
行线组之间保持夹角的性质可得:
∠
犘
犛
v
犗
c
犘
犆犃
v
=
∠
犃犆犅
α
∠
犘
犛
v
犗
c
犘
犅犇
v
= π-
α
∠
犘
犛
v
犗
c
犘
犉
v
= π
/
烅
烄
烆
2
.
(
15
)
11150023
剩余13页未读,继续阅读
2010-03-24 上传
104 浏览量
126 浏览量
179 浏览量
2025-01-09 上传
215 浏览量
2025-02-13 上传
2024-09-12 上传

weixin_38699593
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Linux与iOS自动化开发工具集:SSH免密登录与一键调试
- HTML5基础教程:深入学习与实践指南
- 通过命令行用sonic-pi-tool控制Sonic Pi音乐创作
- 官方发布droiddraw-r1b22,UI设计者的福音
- 探索Lib库的永恒春季:代码与功能的融合
- DTW距离在自适应AP聚类算法中的应用
- 掌握HTML5前端面试核心知识点
- 探索系统应用图标设计与ioc图标的重要性
- C#窗体技巧深度解析
- KDAB发布适用于Mac Touch Bar的Qt小部件
- IIS-v6.0安装文件压缩包介绍
- Android疫情数据整合系统开发教程与应用
- Simulink下的虚拟汽车行驶模型设计
- 自学考试教材《操作系统概论》概述
- 大型公司Java面试题整理
- Java 3D技术开发必备的jar包资源
