KUKA机器人外部轴配置指南
"库卡机器人外部轴配置说明书"
本文档是库卡机器人 GmbH 出版的关于 KUKA 系统软件 8.3 和 VW 系统软件 8.3 的外部轴配置指南,发布日期为2013年12月3日,版本号为 KSS8.3 configuration of kinematic systems V1en。内容涵盖了库卡机器人的装配、操作指导以及专家文档,旨在帮助用户理解和配置库卡机器人系统的外部轴。
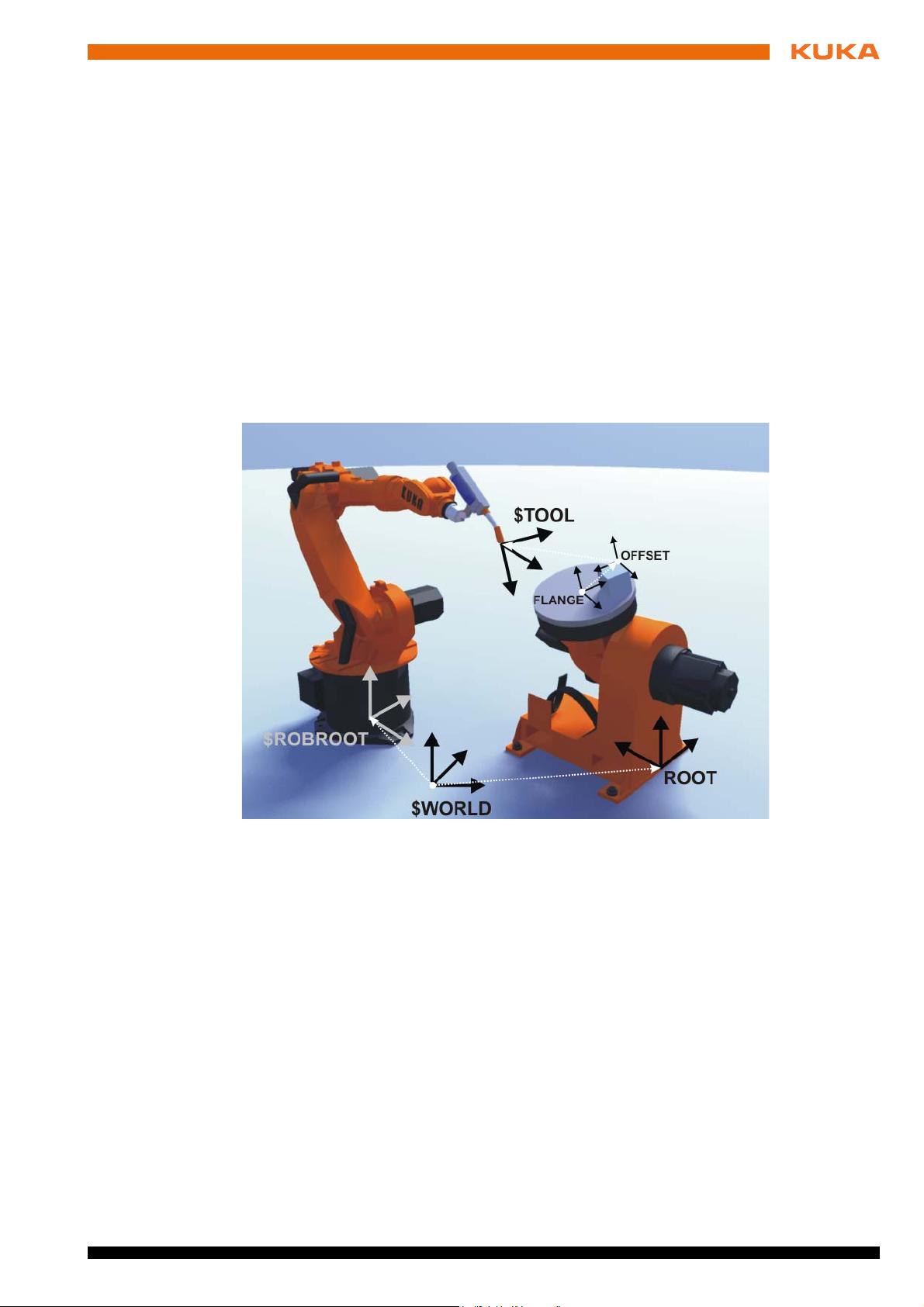
在库卡机器人系统中,外部轴(External Axes)是指除了机器人本体关节之外的附加轴,这些轴可以扩展机器人的运动范围,使得机器人能够适应更复杂的任务环境。例如,它们可以用于控制工件的定位台、旋转装置或者用于调整机器人的工作空间。外部轴的配置是实现这些功能的关键步骤。
配置外部轴的过程涉及以下几个核心知识点:
1. **系统设置**:首先,用户需要在控制器中识别并定义外部轴。这通常通过系统设置菜单进行,包括轴的编号、类型(如直线或旋转)、方向和范围设定。
2. **硬件连接**:外部轴的硬件部分需要正确连接到机器人控制系统。这可能包括电机、编码器、驱动器和电缆等,确保数据和动力传输的正确性。
3. **编程**:在 KUKA 系统软件中,用户需要编写程序来控制外部轴的运动。这可能涉及到使用特定的指令集,如定义轴的运动模式(如关节运动、线性运动或圆周运动)、速度、加速度和目标位置。
4. **调试与测试**:配置完成后,必须对整个系统进行详尽的测试和调试,确保外部轴与机器人本体的协调运动无误,同时避免碰撞和安全风险。
5. **安全措施**:在配置外部轴时,必须考虑机器人的安全操作范围和限制。这包括设置安全区域、限位开关和紧急停止功能,以防止意外伤害。
6. **维护与服务**:在实际应用中,用户可能需要对配置进行调整或更新。此外,如果发生故障,了解如何进行故障排查和维修也是至关重要的。
请注意,尽管此文档已经过检查以确保与描述的硬件和软件相符合,但仍然可能存在不一致之处。库卡机器人 GmbH 不对此提供完全的保证,而且在更换或服务工作中,未在此文档中描述的功能并不意味着用户有权使用。
总结来说,"库卡机器人外部轴配置说明书" 是一份详细的技术文档,它为用户提供了配置和操作库卡机器人外部轴的全面指南,涵盖了从基本的系统配置到高级的编程和调试技巧,是实现机器人系统扩展功能的重要参考资料。


1040 浏览量
382 浏览量
198 浏览量
4082 浏览量
9323 浏览量
198 浏览量
155 浏览量

fresher12364
- 粉丝: 5
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Laravel 8.x的API接口签名认证系统
- PayPal-NET-SDK:用于PayPal RESTful API的.NET SDK
- aireACUMAR:阿卡马尔(ACUMAR)的拿破仑日报
- 广告说服观点
- 基于深度置信网络的多输入单输出回归预测(DBN)(Matlab完整程序和数据)
- decisionmaker:一个微型的Web应用程序,可以帮助您做出决策
- redditclone实践:遵循Spring Boot和Angular教程-通过freeCodeCampprogrammingtechie构建Reddit克隆(编码项目)
- pokemon-weakness-android:Pokemon Weakness的Android应用程序的源代码-Android application source code
- jsonlines:python库可简化jsonlines和ndjson数据的使用
- leetcode答案-EulerFS:欧拉FS
- AmazonS3Client.rar
- go-migrate:用Go编写的抽象迁移框架
- 监控视频.dav文件转码工具,支持转换为多种格式(MP4、AVI、WMV、MXF、GIF、DPG、MTV、AMV、SWF等)
- CM回购
- babel_pug_project:使用babel,pug,node,express进行Web服务器教育
- STNFCSensor_Android:ST NFC Sensor Android应用程序源代码-Android application source code
