视觉SLAM技术15年演进
需积分: 50 135 浏览量
更新于2024-07-17
收藏 7.13MB PDF 举报
"Visual SLAM 15年发展历程(高清版)"
Visual SLAM,全称Simultaneous Localization and Mapping,即同时定位与建图,是机器人技术中的关键算法,主要用于实现移动设备在未知环境中的自主导航。这篇资料由Andrew Davison撰写,他在Imperial College London的Robot Vision Group和Dyson Robotics Laboratory工作,对这一领域有着深入的研究。
自20世纪末以来,Visual SLAM已经取得了显著的发展。Andrew Davison提到的核心特征包括:
1. **闭环估计**:这是SLAM中的关键部分,通过识别已探索过的区域并校正位姿,避免定位漂移,提高定位精度。
2. **预测性**:系统能够预测移动后的位置,使得实时性能得以保障。
3. **高效性**:在有限的计算资源下,实现高效的计算,确保算法能够在实际硬件上运行。
4. **现场演示**:强调Visual SLAM的实际应用价值,不仅在理论上可行,而且可以直观地展示其效果。
5. **单目视觉传感器**:早期的工作主要集中在使用单一的视觉传感器(如摄像头)进行建图和定位,从而实现无漂移、一致的局部化。
6. **多用途性**:由于其核心特性,Visual SLAM适用于多种应用场景,例如无人机导航、自动驾驶汽车、室内机器人等。
7. **商品化硬件**:随着消费级摄像头和处理器的进步,Visual SLAM技术可以更加普及,不再局限于专业设备。
8. **开源软件**:开放源代码的项目,如Davison在AIST Japan期间创建的SceneLib,促进了社区的共享和进步。
Visual SLAM的历史可以追溯到早期的一些开创性工作,比如:
1. **DROID**:Harris在1980年代后期提出的基于特征的视觉里程计,为后来的Visual SLAM奠定了基础。
2. **离线结构从运动(SFM)到序列处理**:例如Fitzgibbon和Pollefeys的工作,逐渐将静态场景的重建扩展到连续序列的处理。
3. **EKF SLAM**:Durrant-Whyte和Leonard等人通过扩展卡尔曼滤波器实现了非视觉传感器的SLAM。
4. **激光扫描匹配**:Gutmann和Konolige等人的研究,展示了激光雷达数据在构建环境地图中的应用。
移动机器人社区在推动这些技术发展方面发挥了重要作用,它们不仅提供了实验平台,还提出了许多挑战和需求,促进了Visual SLAM算法的不断优化和创新。随着时间的推移,Andrew Davison认为这项研究正在向更广泛、实时的空间感知方向发展,尽管它仍然是SLAM,但其应用范围和复杂度都在不断增加。
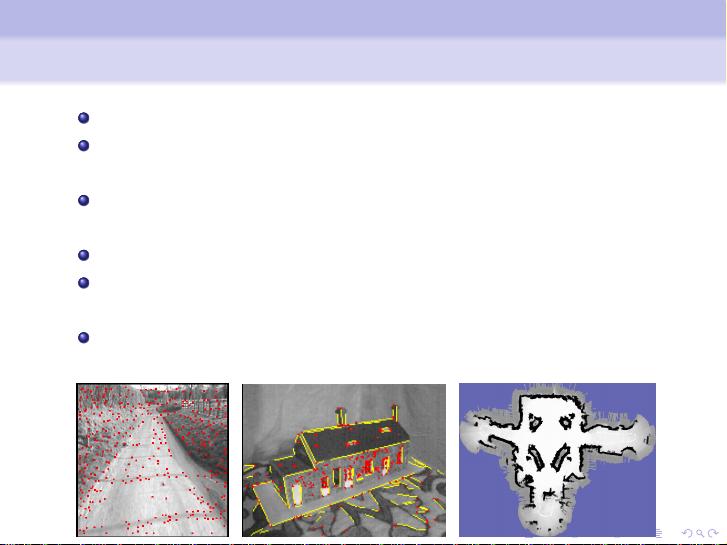
Earlier Inspirations and Building Blocks
DROID (Harris, late 1980s, feature-based VO)
Off-line SFM moving towards sequence processing (e.g.
Fitzgibbon, Pollefeys).
EKF SLAM with non-visual sensors (Durrant-Whyte,
Leonard, etc.).
Laser scan matching (e.g. Gutmann and Konolige).
The mobile robotics community had almost completely
turned away from vision.
The computer vision community had almost completely
turned away from real-time and robotics.
剩余19页未读,继续阅读
2015-05-18 上传
2021-04-29 上传
2024-04-09 上传
2023-09-05 上传
2023-08-28 上传
2023-02-21 上传
2023-09-16 上传
2023-02-21 上传

Enjoylabandlife
- 粉丝: 76
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
