机器视觉与机械臂在智能分拣中的应用研究
版权申诉
PDF格式 | 3.89MB |
更新于2024-06-14
| 37 浏览量 | 举报
"基于机器视觉的机械臂分拣技术研究"
这篇硕士论文主要探讨了如何利用机器视觉技术提升机械臂在分拣作业中的效能。随着"中国制造2025"战略的推进,机械臂在智能制造领域扮演着越来越重要的角色。通过引入机器视觉,可以将传统的工业化生产转变为智能化模式,有效提高生产效率,并改变生产流程。然而,人工分拣存在诸多弊端,因此,本研究专注于机器视觉辅助的机械臂分拣技术。
研究的核心内容包括两大部分:机械臂的运动分析和视觉分类识别。作者以AUBO-i5机械臂为硬件基础,构建了分拣系统,并设计了相应的软件系统,进行了实际的分拣实验验证。这一系统在实际生产环境中具有较高的理论指导价值和应用潜力。
首先,论文利用M-D-H(Modified Denavit-Hartenberg)方法建立了AUBO-i5机械臂的连杆坐标系,并计算了各坐标系之间的齐次转换矩阵,从而进行运动学建模,明确了关节空间与笛卡尔空间的映射关系。通过正逆运动学,实现了机械臂的五次插值轨迹规划。
接着,为了确保视觉系统能精确引导机械臂进行分拣,进行了视觉系统的标定。在HALCON软件中完成了双目标定和双目视觉定位,获取了双目相机的内外参数,并进行了Eye-to-hand模式的手眼标定,得到了相机坐标系与机械臂坐标系的转换矩阵。
在图像处理和分类识别方面,论文针对单一特征分类准确度较低的问题,提出了多特征融合的方法。在图像预处理后,提取了工件的仿射不变矩、圆形性和矩形度等多种特征,构建了分类器数据集,以提高分类识别的准确性。针对图像质量差导致的识别率下降问题,采用了改进的Retinex方法来增强图像质量。
此外,针对传统工件分类方法的局限性,论文提出了一种结合量子粒子群优化(QPSO)和BP神经网络的工件分类识别方法。QPSO用于优化BP网络的权重和阈值,避免了传统粒子群算法可能陷入局部最优的困境。通过特征向量和类别标签构建数据集,先在QPSO-BP网络中进行训练,然后使用训练好的分类器进行物体分类识别。
最后,实验部分以AUBO-i5机械臂为基础搭建了实验系统,运用QPSO-BP分类方法和图像处理软件,成功实现了对不同工件的自动分拣。
这篇论文详细阐述了基于机器视觉的机械臂分拣技术,从运动控制到视觉识别,再到智能分类,为提升智能制造的自动化水平提供了有力的技术支持。

重庆邮电大学硕士学位论文 第 1 章 绪论
6
中光照是影响机械臂进行精准视觉分拣工作的重要因素,故本文主要对机器视觉
与机械臂相结合进行分拣工作的关键技术进行研究。
1.3 论文的主要研究内容及组织结构
1.3.1 主要研究内容
本文主要研究基 于 机 器 视 觉 的 机 械 臂对 不同 工 件的 智 能分 拣技 术 ,以
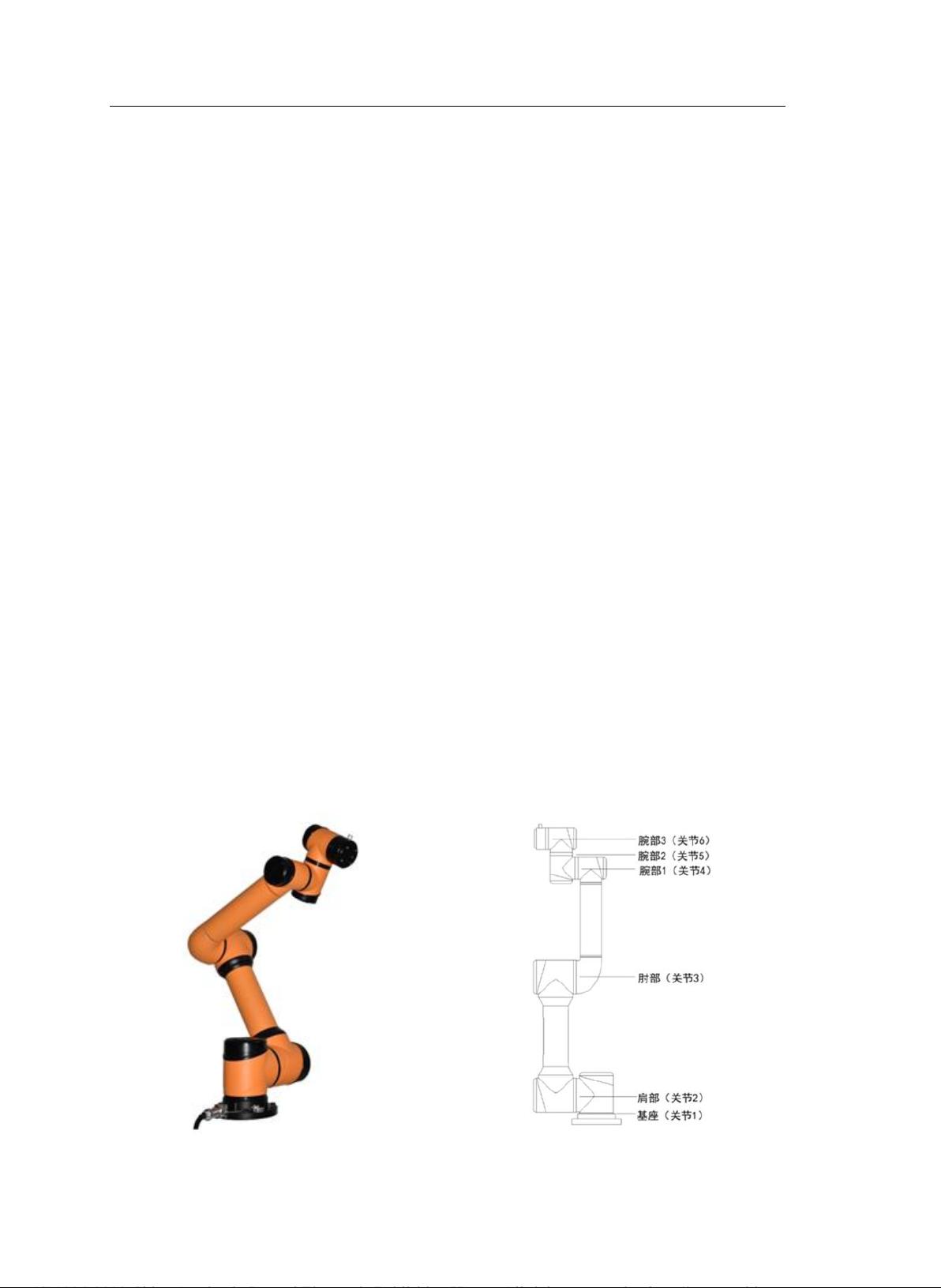
AUBO-i5 型六轴机械臂和摄像机为实验平台主要包含四部分工作内容。首先,研
究机械臂抓取物体过程中的运动学问题,包括在 M-D-H 参数方式下的机械臂正、
逆运动学求解和根据不同任务要求的轨迹规划。其次,针对在工厂等恶劣的生产
环境中存在采集的图像信息不完整、目标物体辨认度较低等问题,本文提出改进
的 Retinex 方法对采集的图像进行增强降噪处理以提高分类识别的精度。然后,整
个分拣系统需要机械臂控制系统和视觉分类识别系统相结合才能完成分拣工作,
故需要对视觉系统进行 Eye-to-hand 模式的手眼标定、相机标定。最后,研究不同
工件的视觉分类识别,针对工件分类识别过程中存在的精度问题采用量子粒子群
优化神经网络的方法进行不同物体的分类识别,并依据分类识别结果引导机械臂
完成分拣工作。
1.3.2 论文组织结构
本文主要的研究内容分为六章,各章节的工作内容安排如下:
第 1 章:首先叙述了机械臂结合机器视觉技术在智能制造发展中的研究背景
和意义,然后对机械臂在视觉分拣相关领域的国内外研究现状进行了概述,最后
明确了本文的主要工作内容。
第 2 章:首先介绍了机械臂运动学所需的相关数学理论基础,建立机械臂连
杆坐标系并获得对应连杆参数,在 M-D-H 参数表的基础上建立 AUBO-i5 机械臂
的连杆坐标系。然后对 AUBO-i5 机械臂的正逆运动学进行推导计算,建立笛卡尔
空间与关节空间的映射关系。最后在 MATLAB 中做出 AUBO-i5 机械臂的轨迹规
划。

剩余79页未读,继续阅读
相关推荐


ohmygodvv
- 粉丝: 507
- 资源: 4982
 我的内容管理
展开
我的内容管理
展开







