KUKA机器人KR C4控制柜IO模块接线与组态指南
版权申诉
166 浏览量
更新于2024-08-05
1
收藏 2.06MB DOCX 举报
本文档详细介绍了KUKA机器人KR C4标准控制柜中IO输入输出模块的接线方法和配置步骤。主要涉及了如何使用WorkVisual软件导入和配置Beckhoff EtherCAT模块,以及如何在总线结构中添加和连接数字输入输出模块。
在配置KUKA机器人KR C4的标准控制柜时,首先需要正确接线和组态IO模块。工作流程包括以下几个关键步骤:
1. 使用WorkVisual软件:打开软件,但不需加载任何项目。通过“文件”菜单选择“导入/导出”功能。
2. 导入设备说明文件:选择“导入设备说明文件”,然后选择“EtherCAT ESI”类型的文件,例如Beckhoff的EK11xx、EL1xxx和EL2xxx系列模块。
3. 安装设备说明:系统会自动安装导入的文件,确保正确导入所有必要的模块。
4. 打开或创建项目:选中控制系统并激活,以便进行下一步的配置。
5. 添加总线结构:在项目中选择总线结构,右键添加KUKAExtensionBus(SYS-X44)。
6. 添加总线耦合器和输入输出模块:在KUKAExtensionBus下,添加EK1100 EtherCAT Coupler和相应的EL1809数字量输入模块以及EL2809数字量输出模块。
7. 接线和绑定:在WorkVisual中,选择输入输出接线,将数字输入端与EL1809的输入点连接,数字输出端与EL2809的输出点连接。使用Ctrl+A全选并拖拽完成绑定。
8. 实物接线:确保物理上正确连接总线耦合器和输入输出模块。例如,将KUKA ACCU上的X44接口连接到EK1100的EtherCAT IN,同时连接电源和信号线。
9. 输入模块(如EL1809)的接线需遵循其技术规格,如PNP型输入高电平有效,正确连接传感器或开关按钮。
这些步骤对于确保KUKA机器人KR C4控制柜中的IO模块正常工作至关重要。正确的接线和配置可以确保机器人能够正确接收和发送数字信号,从而实现与外部设备的有效交互。在实际操作中,务必仔细检查每一步,遵循制造商的指导,以防止出现电气故障或通信问题。
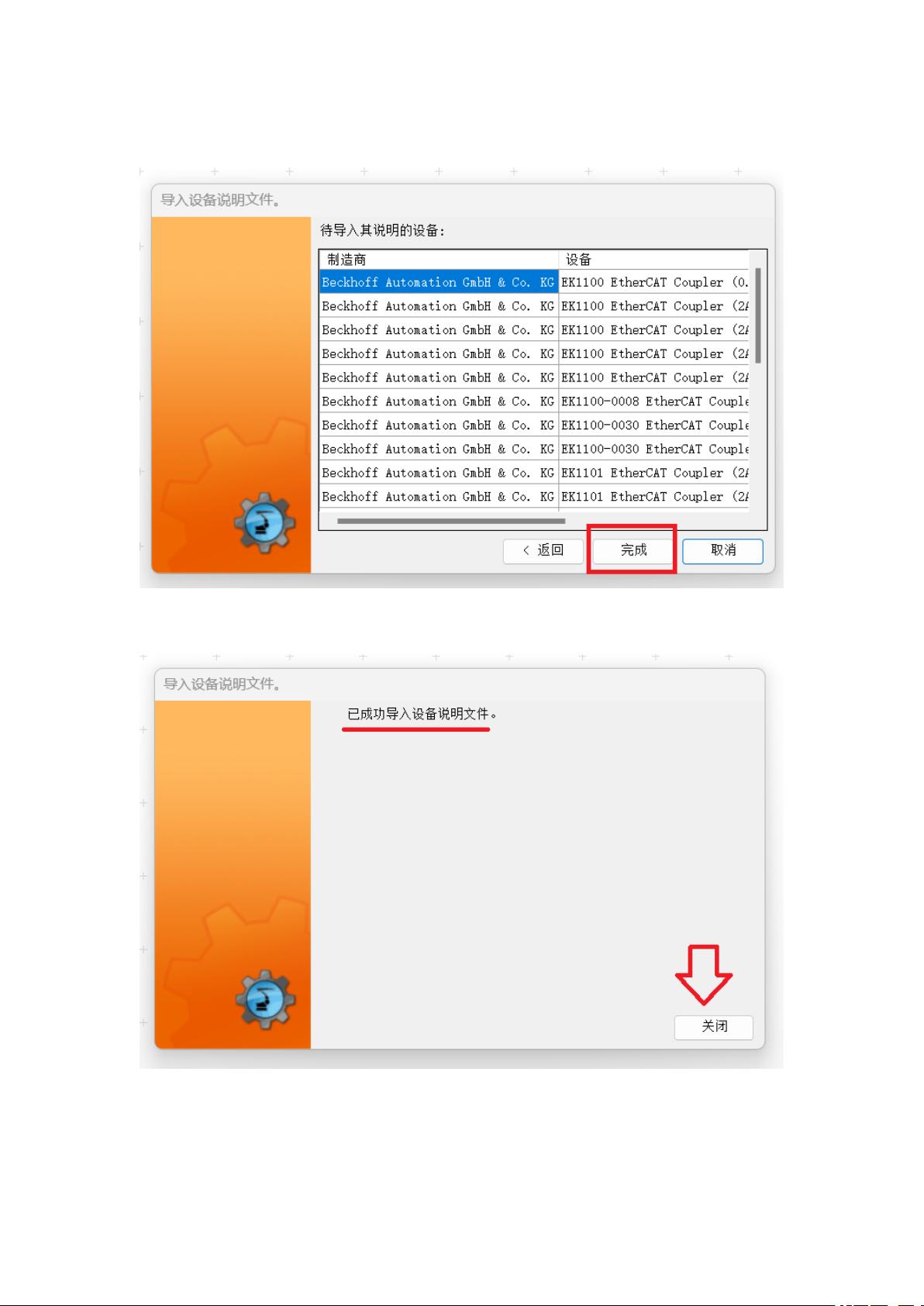
如下图所示,点击完成后,系统会自动开始安装导入的设备说明文件,
如下图所示,安装完成后,显示已成功导入设备说明文件,点击关闭,
同样的方式,继续导入 Beckhoff EL1xxx 和 Beckhoff EL2xxx 设备说明文件,
剩余11页未读,继续阅读
2018-12-18 上传
2023-10-03 上传
2023-10-26 上传
2023-05-24 上传
2023-06-28 上传
2023-05-11 上传
2023-07-19 上传

AAA_自动化工程师
- 粉丝: 6687
- 资源: 3399
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
