自动驾驶体系结构详解:定位、感知与规划算法解析
99 浏览量
更新于2024-08-28
9
收藏 350KB PDF 举报
自动驾驶综述深入探讨了自动驾驶汽车的核心组成部分,包括定位、感知和规划的关键算法。自动驾驶系统主要由感知系统和决策系统构成,这两个系统共同协作实现车辆的自主驾驶。
感知系统是自动驾驶的基础,它由多个子系统组成,如:
1. 定位:利用GPS、IMU和里程计等设备获取车辆的精确位置信息,即使在GPS信号受阻的城市环境中,也需要结合其他传感器数据进行辅助定位。
2. 静态障碍物测绘:通过LIDAR和雷达扫描环境,构建静态地图,以便了解周围障碍物的位置。
3. 移动障碍物检测与跟踪:摄像头捕捉实时图像,通过目标检测算法识别行人、车辆等动态障碍物,并持续跟踪它们的运动轨迹。
4. 道路测绘:不仅限于物理道路,还包括道路标志、车道线、交通信号等,帮助车辆理解行驶环境。
5. 交通信号检测与识别:解析信号灯状态,指导车辆执行相应的驾驶策略。
决策系统则是系统的“大脑”,其子系统包括:
1. 路径规划:基于车辆当前位置和目标位置,选择最安全、高效的行驶路线。
2. 行为选择:确定车辆应如何响应不同驾驶场景,如保持车道、处理路口、应对红绿灯等。
3. 运动规划:制定车辆的加速度和转向指令,确保安全行驶。
4. 控制:将决策转化为实际的车辆动作,如油门、刹车和方向盘操作。
整个自动驾驶过程依赖于传感器数据的融合和处理,以及对环境的实时理解和预测。定位和感知模块提供车辆的精确状态,决策系统则根据这些信息做出驾驶决策,确保车辆在复杂的交通环境中安全、高效地运行。同时,为了提高性能和鲁棒性,系统还需要不断地更新和优化算法,以适应不断变化的道路条件和交通环境。
自动驾驶综述自动驾驶综述|定位、感知、规划常见算法汇总定位、感知、规划常见算法汇总
自驾车自动驾驶系统的体系结构一般分为感知系统和决策系统。感知系统一般分为许多子系统,负责自动驾驶汽车定位、静态
障碍物测绘、移动障碍物检测与跟踪、道路测绘、交通信号检测与识别等任务。决策系统通常被划分为许多子系统,负责诸如
路径规划、路径规划、行为选择、运动规划和控制等任务。
一、自动驾驶汽车体系结构概述
这一部分概述了自动驾驶汽车自动化系统的典型体系结构,并对感知系统、决策系统及其子系统的职责进行了评述。
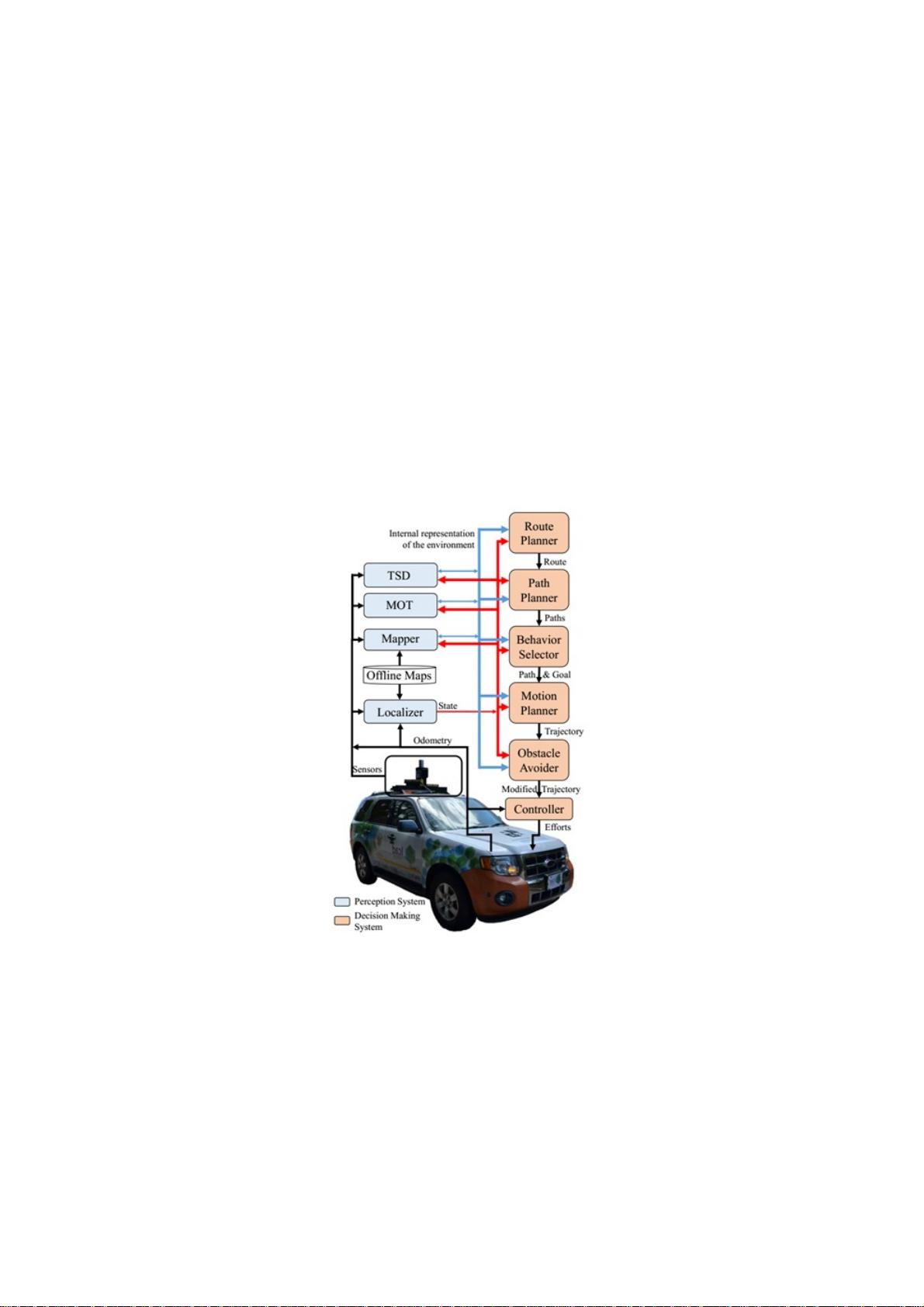
下图显示了自动驾驶汽车系统的典型架构框图,其中感知和决策系统显示为不同颜色的模块集合。感知系统负责使用车载传感
器捕获的数据,如光探测和测距(LIDAR)、无线电探测和测距(雷达)、摄像机、全球定位系统(GPS),惯性测量单元
(IMU)、里程表,以及有关传感器模型、道路网络、交通规则、汽车动力学等的先验信息的决策。
决策系统负责将汽车从初始位置导航到用户定义的最终目标,考虑到车辆状态和环境的内部表现,以及交通规则和乘客的舒适
度。为了在整个环境中导航汽车,决策系统需要知道汽车在其中的位置。定位器模块负责根据环境的静态地图估计车辆状态
(姿态、线速度、角速度等)。这些静态地图在自动操作之前自动计算,通常使用自动驾驶汽车本身的传感器,尽管需要手动
注释(即人行横道或红绿灯的位置)或编辑(即移除传感器捕获的非静态物体)。自动驾驶汽车可以使用一个或多个不同的离
线地图,如占用网格地图、缓解地图或地标地图,进行定位。
定位模块接收离线地图、传感器数据和平台里程计作为输入,并生成自动驾驶汽车的状态作为输出。需要注意的是,虽然
GPS可能有助于定位控制器的处理,但由于树木、建筑物、隧道等造成的干扰,使得GPS定位不可靠,仅GPS在城市环境中
进行适当的定位是不够的。映射器模块接收离线地图和状态作为输入,并生成在线地图作为输出。该在线地图通常是离线地图
中的信息和使用传感器数据和当前状态在线计算的占用网格地图的合并。在线地图最好只包含环境的静态表示,因为这可能有
助于决策系统的某些模块的操作。为了允许检测和移除在线地图中的移动对象,通常使用移动对象跟踪模块或MOT。
行为选择器模块负责选择当前的驾驶行为,如车道保持、交叉口处理、红绿灯处理等。行为选择器根据当前驾驶行为选择目
标,并在决策时间范围内避免与环境中的静态和移动障碍物发生碰撞。运动规划模块负责计算从当前车辆状态到当前目标的轨
迹,该轨迹遵循行为选择器定义的路径,满足车辆的运动学和动力学约束,并为乘客提供舒适性。
二、感知模块
在这一部分中,我们研究了文献中提出的自动驾驶汽车感知系统的重要方法,包括定位(或定位)、离线障碍物映射、道路映
射、移动障碍物跟踪和交通信号检测与识别。
定位模块负责估计自动驾驶汽车相对于地图或道路的姿态(位置和方向)(例如,由路缘或道路标记表示)。大多数通用定位
子系统都是基于GPS的。然而,总的来说,它们不适用于城市自动驾驶汽车,因为GPS信号不能保证在封闭区域,如树下、
城市峡谷(被大型建筑物包围的道路)或隧道中。文献中提出了各种不依赖GPS的定位方法。它们主要分为三类:基于激光
雷达的、基于激光雷达加相机的和基于相机的。基于激光雷达的定位方法完全依赖于激光雷达传感器,具有测量精度高、处理
方便等优点。然而,尽管激光雷达行业努力降低生产成本,但与相机相比,它仍然有很高的价格。在典型的基于
LIDAR+camera的定位方法中,LIDAR数据仅用于建立地图,并使用相机数据估计自动驾驶汽车相对于地图的位置,从而降低
了成本。基于摄像机的定位方法是廉价和方便的,尽管通常不太精确和可靠。
1.定位
下载后可阅读完整内容,剩余6页未读,立即下载
2019-11-06 上传
2021-08-17 上传
2024-10-13 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-05 上传

weixin_38621104
- 粉丝: 1
- 资源: 957
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
